
大型船舶逆合成孔径雷达(ISAR)CST仿真实例
Inverse Synthetic Aperture Radar (ISAR),是一种雷达,利用电磁波反射收到距离影响的原理,分辨目标的三维形状。用于气象,军事探测等等。本期展示如何获得ISAR的二维图结果,用来定位目标的局部重点散射区域。
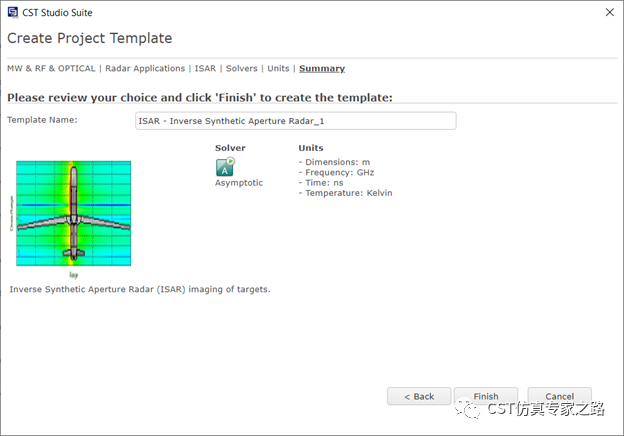
开ISAR模板,自动选好A求解器:
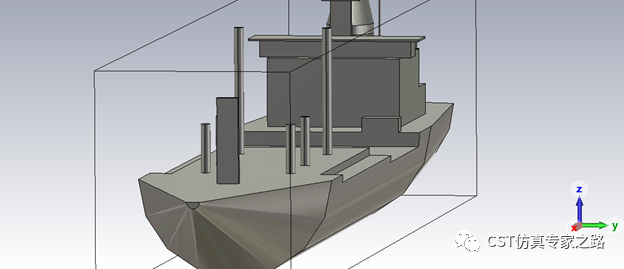
导入模型CAD:

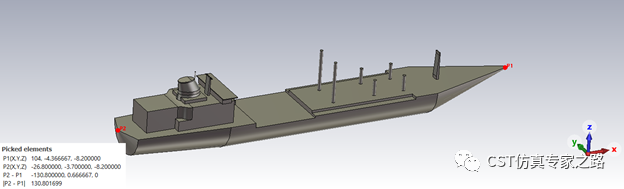
该船模型130米长,在ISAR常用频率10GHz时相当于电尺寸4000个波长。

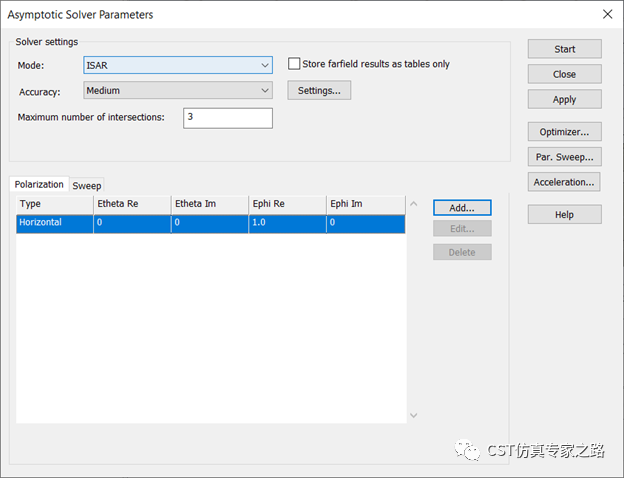
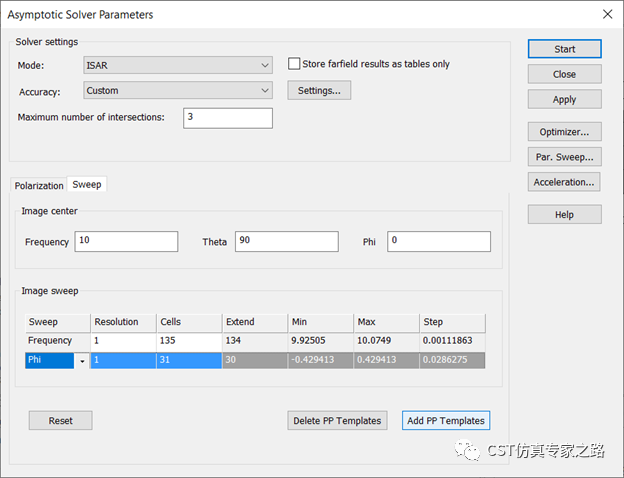
A求解器中已选择ISAR计算模式,设置入射平面波极化:
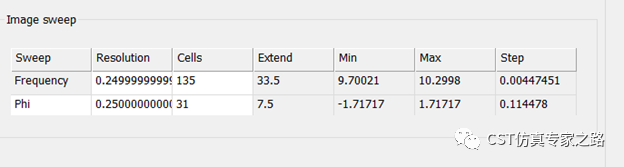
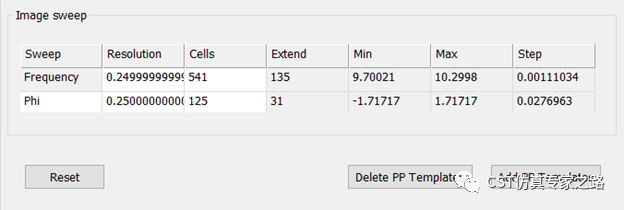
然后Sweep选项中,分别对频率和扫描设置分辨率和晶格数。这里简单解释就是Resolution和Cell的乘积要够大,才能包括目标的尺寸。其中frequency是用来探测距离range,扫描角是用来探测横向距离cross-range。由于船在距离方向(船长)较长,在横向距离方向(船宽)较短,所以这里设置Phi的cell不多。
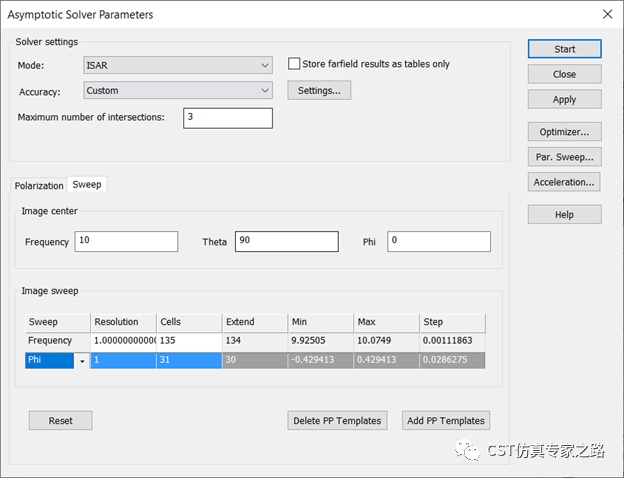
注意这里观察的角度(image center)是Theta=90,Phi=0,就是从船头正面看:

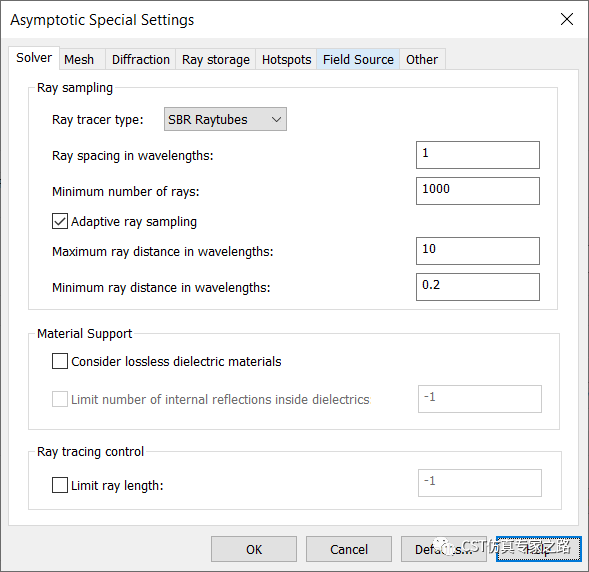
Settings中设置求解器,尺寸大结构平滑的适合用SBR Raytudes,这里我们将最大最小的射线长度都加大,为了快速得到仿真结果:
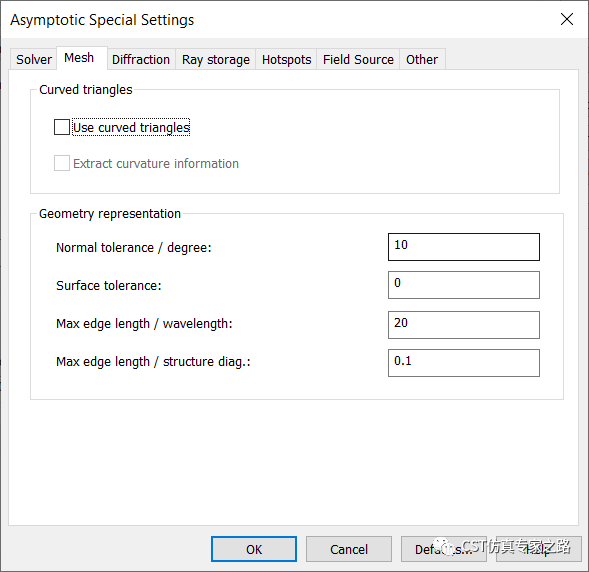
网格我们也调稀疏一些,加快速度:
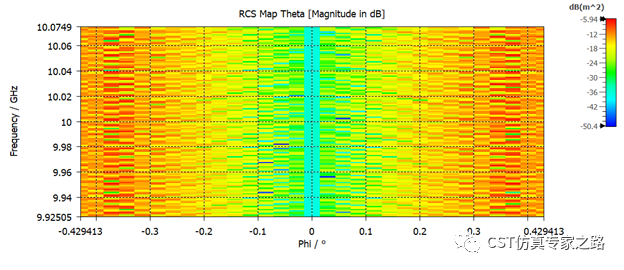
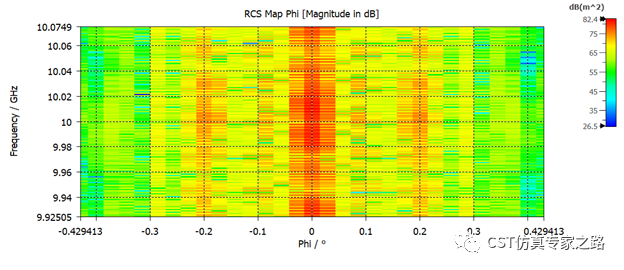
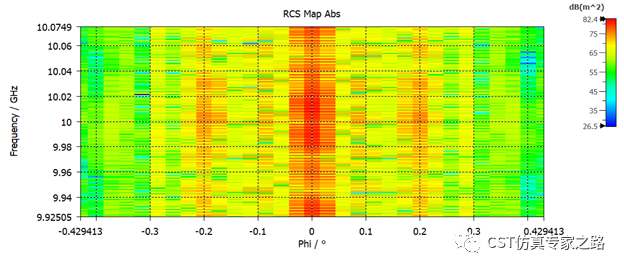
开始仿真。结束后可见RCS的结果,所以这个是扫描一个很小范围的角度,可参考ISAR理论来了解为什么是个小角度扫描。
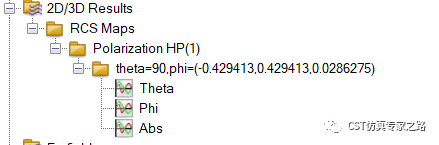
可见这里入射波极化是Phi,RCS也是Phi为主。
得到这些RCS结果之后,回到求解器,点击添加PP后处理:
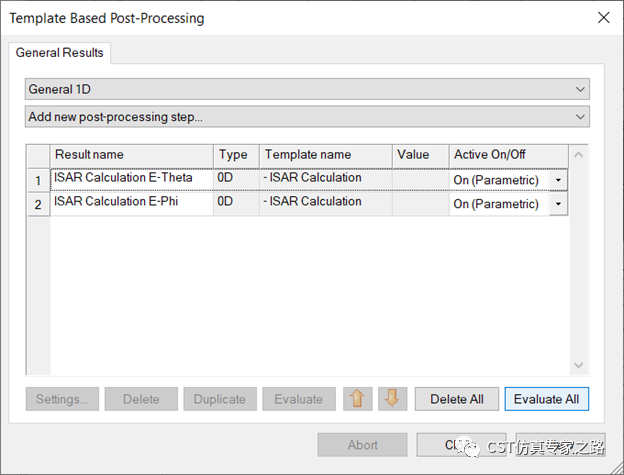
前往后处理,可见两个模板已添加。如果扫描设置改变,重新仿真,则需要这里删除PP后处理,再重新添加。原因要打开ISAR后处理查看:
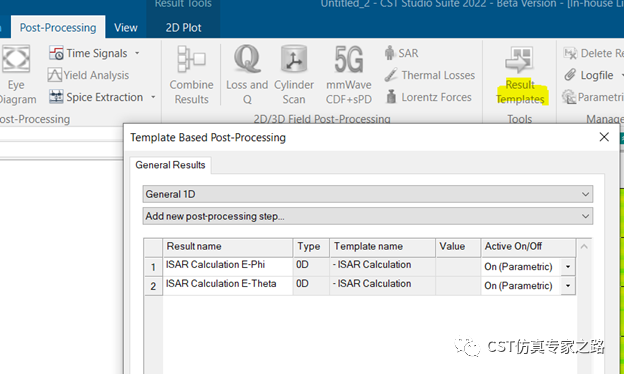
模板会调用RCS的结果,路径自动设置好,所以RCS结果发生改变就要重新生成这个后处理哦。
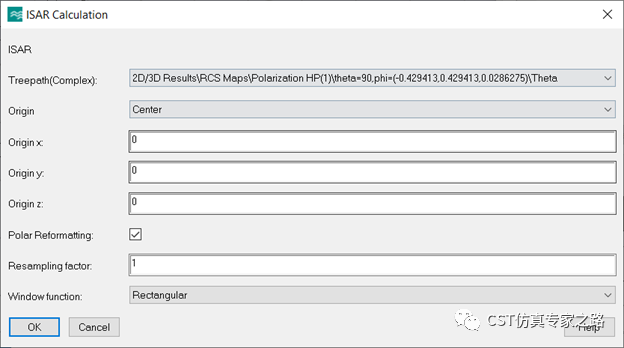
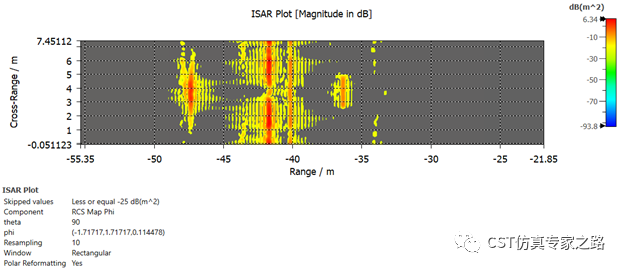
后处理中可以调整ISAR图的中心点,比如就要看目标局部的ISAR时可以使用。
极坐标重新格式化(polar reformatting)是一种图像形成技术,选该选项会在计算 ISAR 图像之前,将原始数据(角度/频率平面)首先投影到笛卡尔网格上,推荐使用,提高精度。重采样系数一会介绍,先用1.
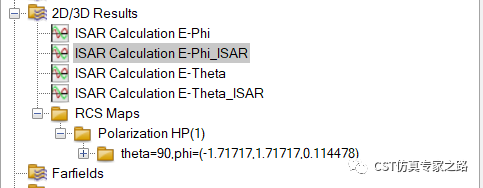
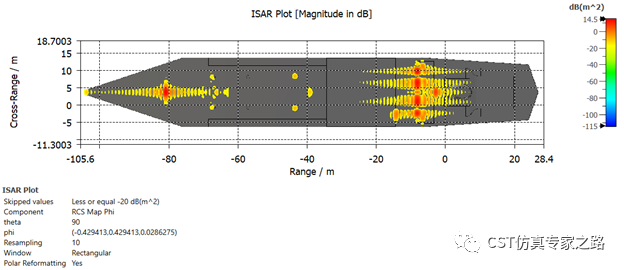
Evaluate All更新全部后处理,得到两个ISAR图:(另外两个是原始数据而已)

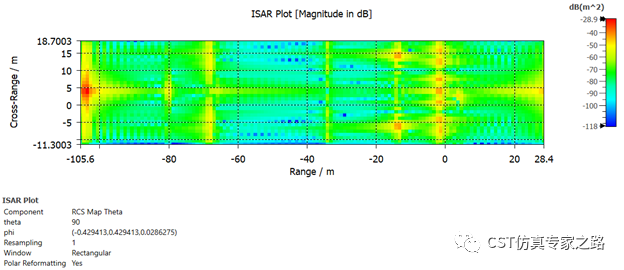
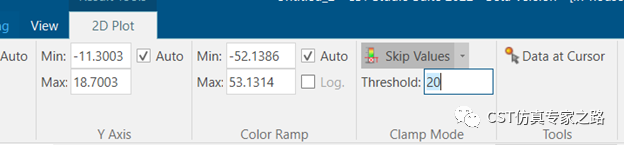
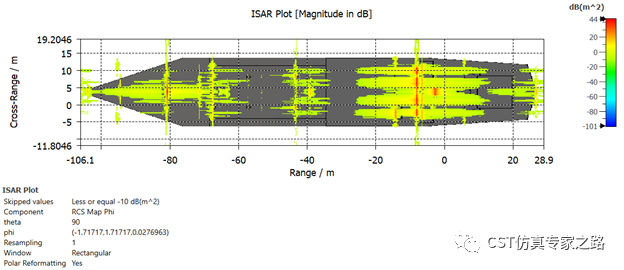
可忽略一定值以下的ISAR结果,就可以看到目标反射的主要部位了:
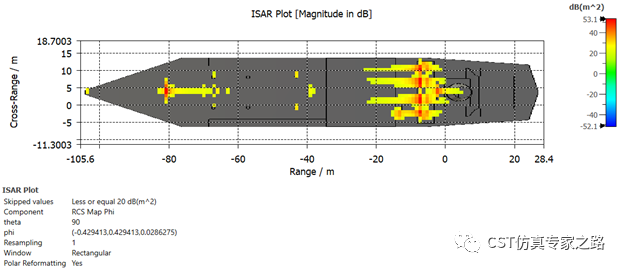
如果观察三维结果,确实是这几个地方反射比较强:
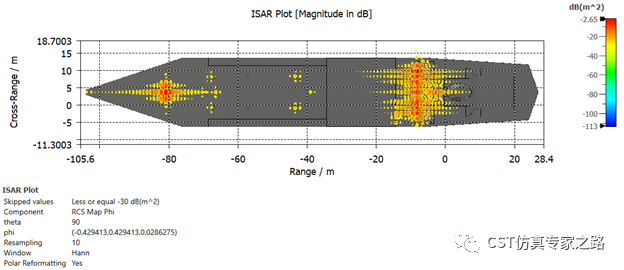
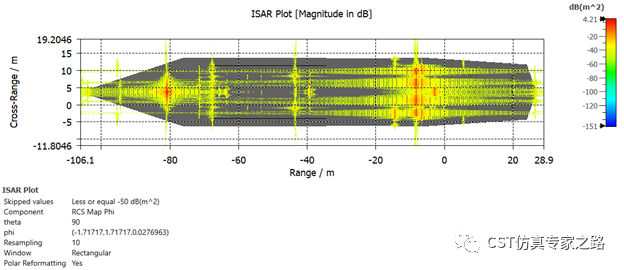
如果在后处理中增加采样系数,可得到更平滑的结果:
如果在后处理中选择不同的窗口函数,呈现效果略有不同:
测试情况A: 小分辨率,少cells,仿真时间较短,但覆盖范围不够大
后处理1倍采样:

后处理多倍采样:
测试情况B: 小分辨率,多cells,仿真时间较长,覆盖范围够大
后处理1倍采样:
后处理多倍采样:
最后说明,最新版本的自带案例中包括本期介绍的ISAR案例。

小结:
1. ISAR的计算是A求解器的计算模式之一,扫描一个很小的角度。
2. ISAR的后处理需要和RCS结果同步,所以要留意及时删除和重新添加。
3. 本案例中A求解器的射线精度降低,速度增加;ISAR后处理可以继续调整精度。




