
CST无人机RCS仿真实例06 - 一维距离像(HRRP)和正弦图(Sinogram)
“高分辨距离像(HRRP,high resolution range profile)是用宽带雷达信号获取的目标散射点复子回波在雷达射线上投影的向量和,它提供了目标散射点沿距离方向的分布信息,其特点是通过发出某一波长的高频信号,通过反射成像时间和位置,从而得出高分辨率距离像,具有目标重要的结构特征,对目标识别与分类十分有价值,因而成为雷达自动目标识别的新技术。”(来自百度百科)
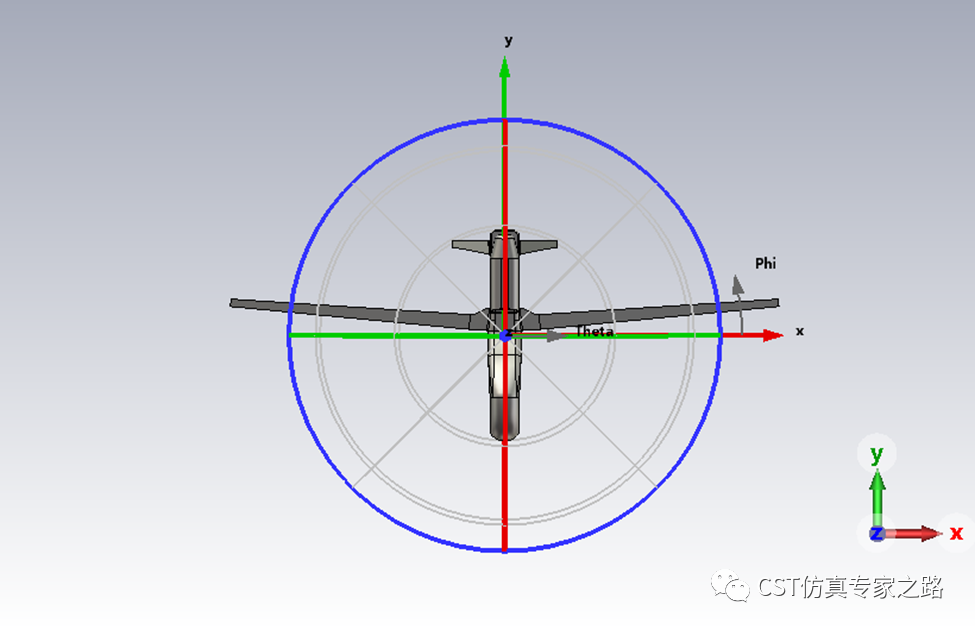
之前的案例用的这个无人机模型机头是朝Z方向的,尺寸大概116英尺:
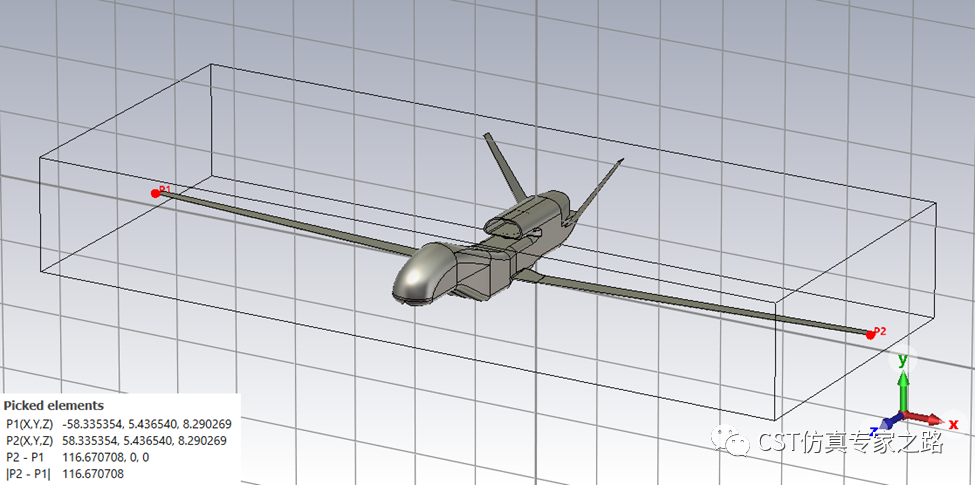
这期我们用类似的模型,尺寸改成11.6m,机头水平,看看A求解器计算的距离像。

选择RCS模板,A求解器,单位m:

设置频率范围:
导入CAD:
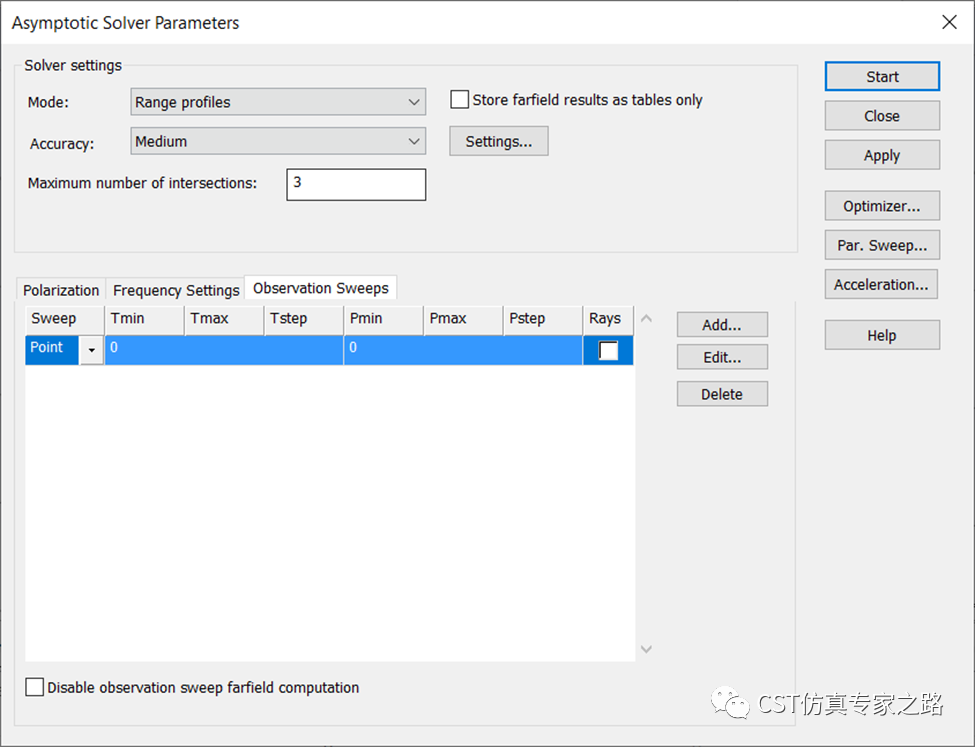
进入A求解器,选择Range profiles,极化添加竖着极化:

因为是要看距离图,所以频率这边设置就要多一些,都是雷达测距的一些信号处理的参数。默认是自动根据结构尺寸和设置的频率范围,计算的Fmin最小频率;窗口函数默认为Hamming。我们这里将采样调高一点:

一维距离像:
如果我们在观察角设置一个点,那么得到的就是一维的距离像, RCS vs Range:
开始仿真,结束后得到:
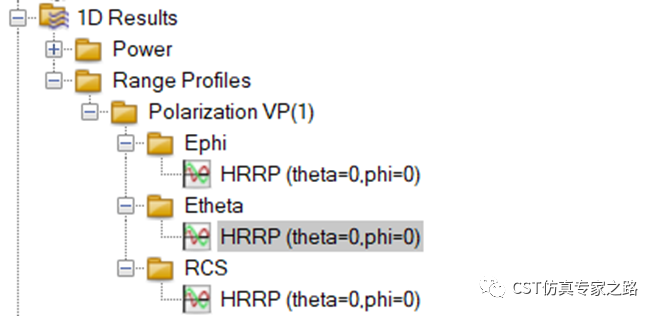
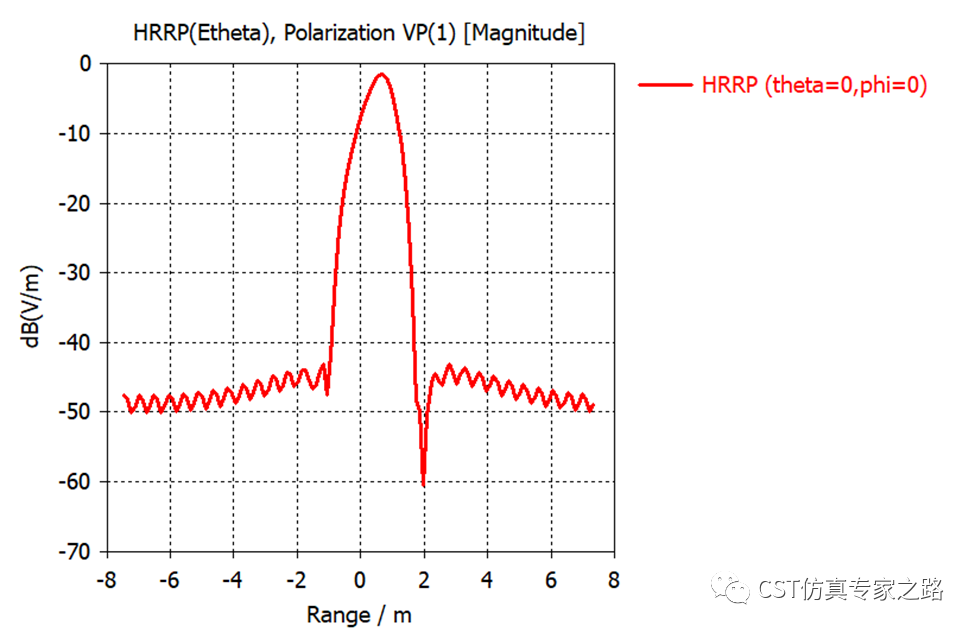
可见该极化的RCS以Theta为主,在距离为0米左右的位置RCS达到峰值,这个位置就是机身和机翼的Z方向的表面的位置,这些位置对于该角度的反射是最强的:

二维距离像---正弦图:
我们将扫描角度设置成Theta的全角,这样得到的就是二维正弦图,Range vs Angle:

开始仿真。结束之后,可见二维的正弦图结果:
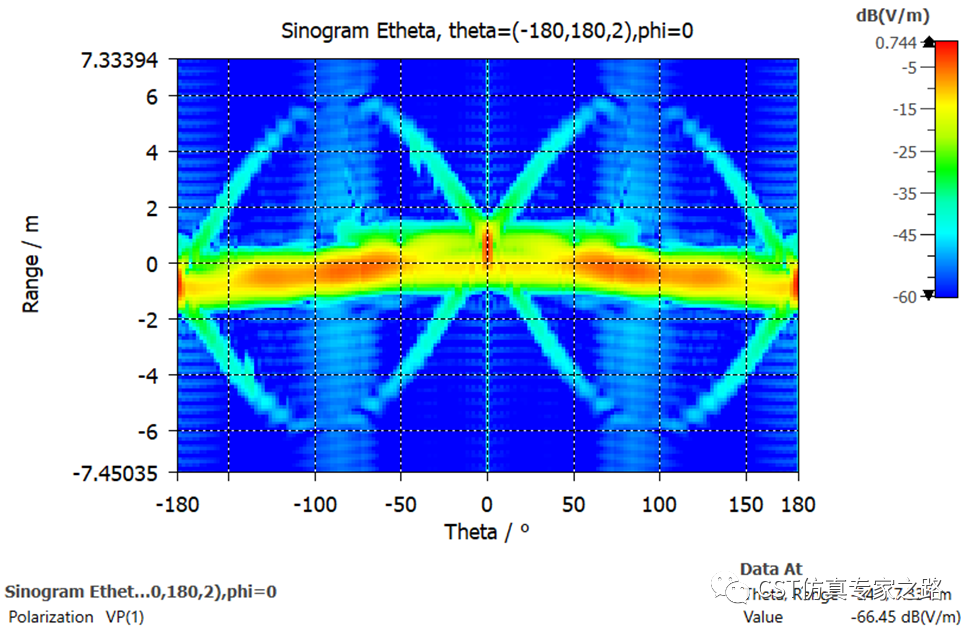
调整色彩图范围,看的更清晰:

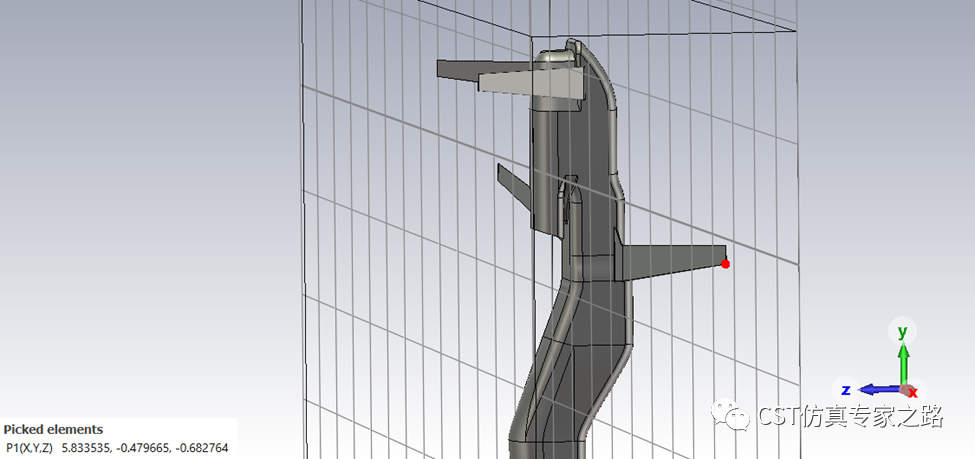
可见随着Theta角的变换,有两个纵坐标的距离分支,这个对应的就是两个机翼,机翼最远的X距离是5.8左右,所以图中两个分支最大就到5.8就断掉了:
除了两个分支,机身的距离像在theta=0到theta=180或-180的过程中,从略比0大,变成略比0小,这个对应侧面和后面的机身位置:

小结:
1. 距离像range profile,或叫HRRP,是A求解器的求解模式之一。
2. 要注意CAD模型的单位和尺寸,对雷达结果影响是很大的,默认A求解器计算HRRP是自动检测CAD尺寸然后调整带宽的。




