
CST无人机RCS仿真实例03 - A求解器多角度单频单站RCS
来源:CST仿真专家之路
更新时间:2024-06-23
阅读:
上期我们看了I求解器计算单站RCS,这期我们用同样的模型,看看A求解器计算单站RCS,简单对比。
用大尺寸的RCS模板:

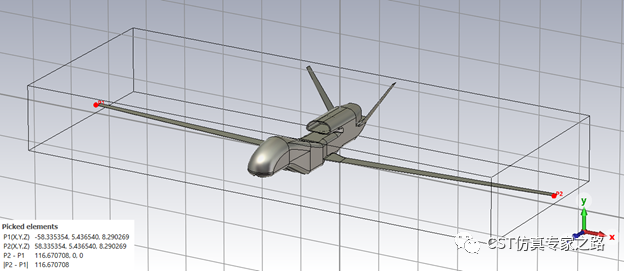
导入模型,这次我们看原尺寸的模型:
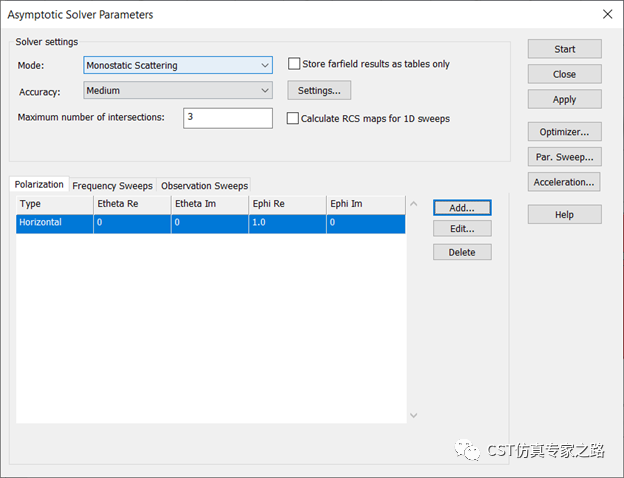
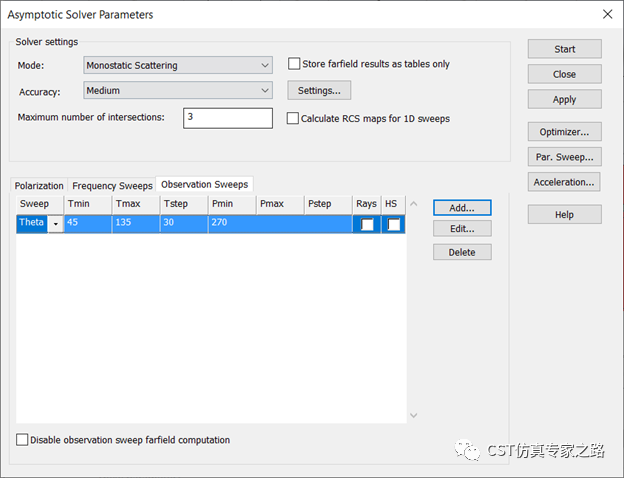
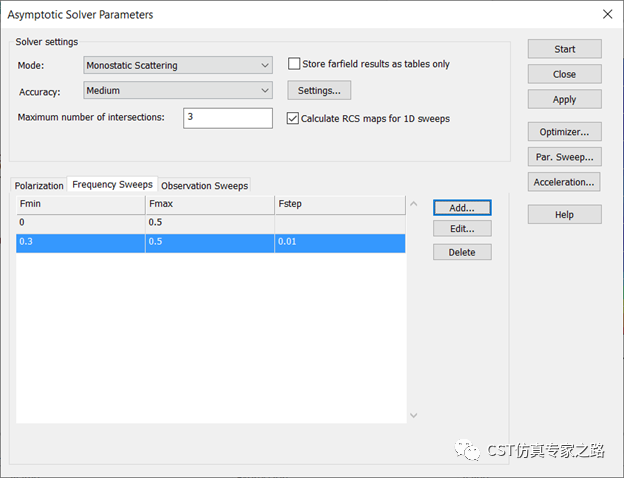
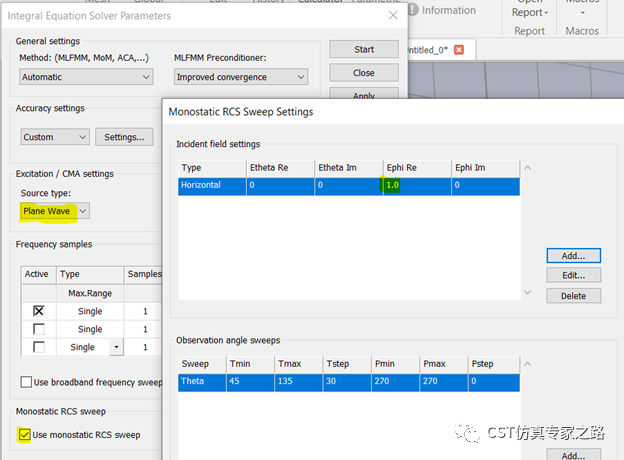
进入A求解器设置:

选择单站散射模式计算,添加水平极化:
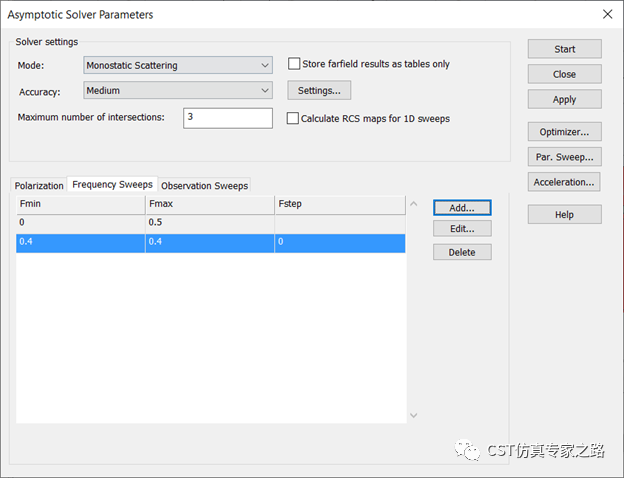
添加频点0.4GHz:
添加扫描角度:
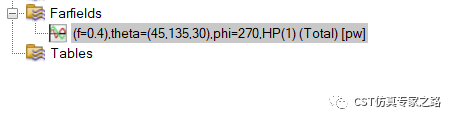
等效的平面波参数扫描是这样的:
开始仿真,结束后看远场结果:
换成1DCartesian形式:

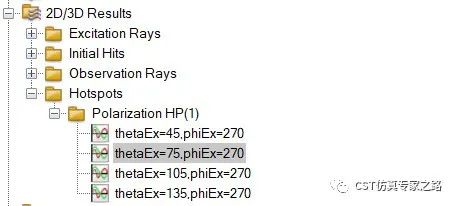
如果我们在求解器中开启射线(Rays)和热点计算(HS,hotspot),重新仿真,那么将得到一系列的场:
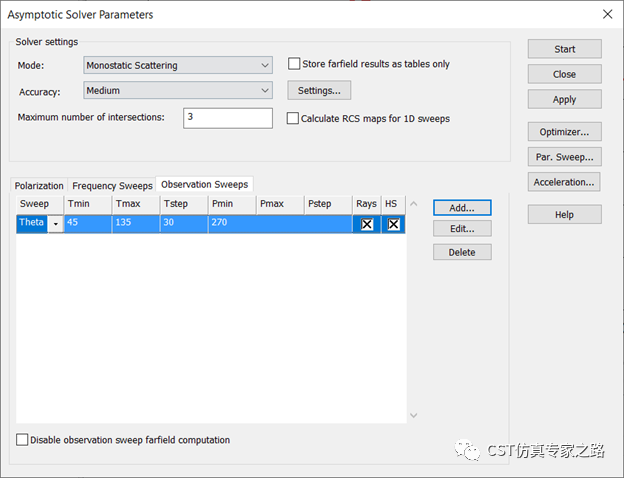
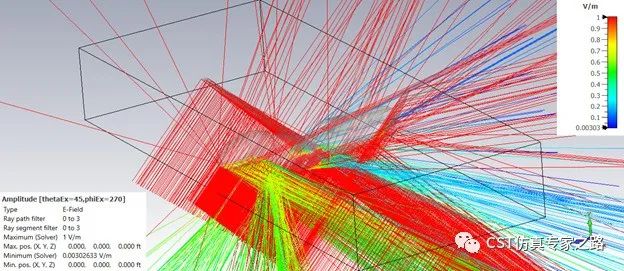
激励射线,蓝色0表示没有反射的,浅蓝色1是第一次反射,黄色2是第二次反射,红色3是第三次反射。

射线强度:
可用鼠标探针查看具体位置:
入射射线的落点:
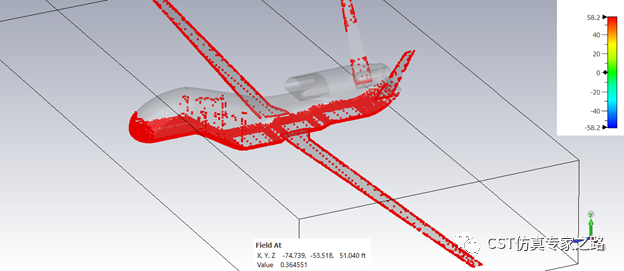
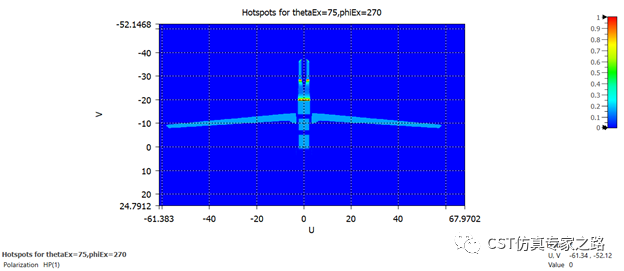
反射的热点:
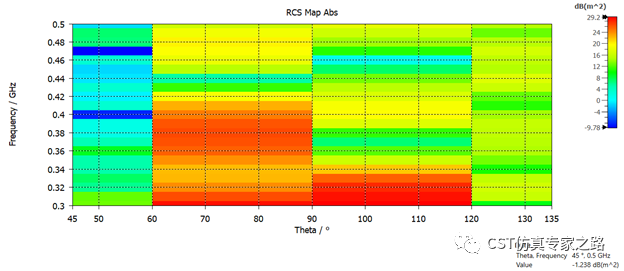
如果我们将1DRCS map开启,并多扫一些频点,重新运行,则得到单站RCS的分布图:
下面我们用I-solver简单对比验证,

定义初始的平面波参数:

I-solver中单站RCS快扫,定义极化和扫描角,与刚才A-solver一致:
开始仿真,较A-solver慢很多,因为电尺寸较大,网格较多:

结果对比:
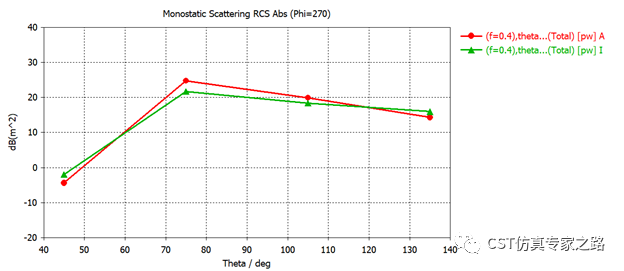
小结:
1. 电大尺寸的RCS计算可用A-solver,速度非常快,几秒钟就得到结果,也可多角度多频点地扫描出RCS map。
2. A-solver计算RCS不需要平面波和远场监视器,但是I-solver需要,所以为了转换方便,可保留平面波。
3. 本案例用的两个求解器都没有对精度和收敛进行分析。




