
CST无人机RCS仿真实例02 - I求解器多角度单频单站RCS
来源:CST仿真专家之路
更新时间:2024-06-23
阅读:
上期我们看了I求解器计算双站RCS,这期我们用同样的模型,看看I求解器计算单站RCS。
模型和准备流程一样,先用模板:
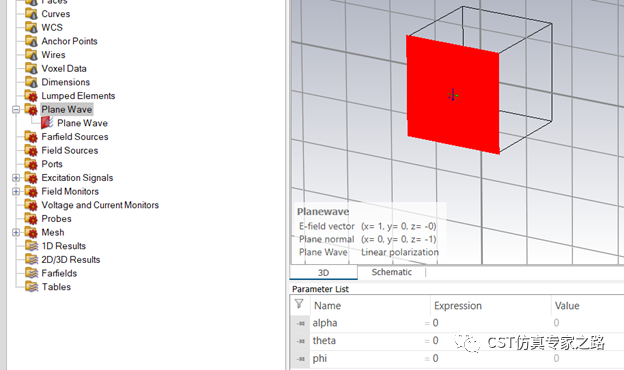
模板自动添加好平面波并参数化:
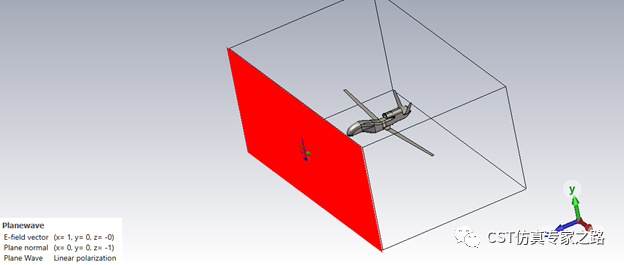
导入CAD模型,该模型机是缩小了30倍的,在0.4GHz就不算电尺寸很大,为了快速演示流程。

定义极化和初始的入射角,比如从机头正入射:

第一个方法是和T-solver一样,多角度的参数扫描。定义远场监视器和远场后处理提取单站RCS。

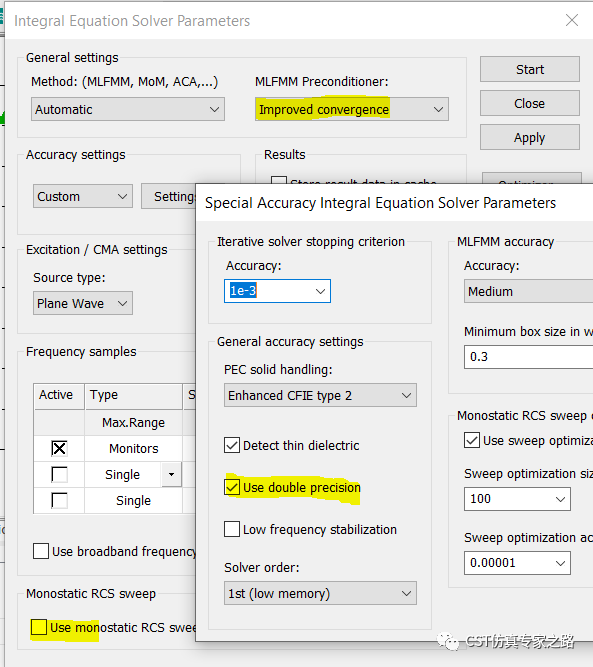
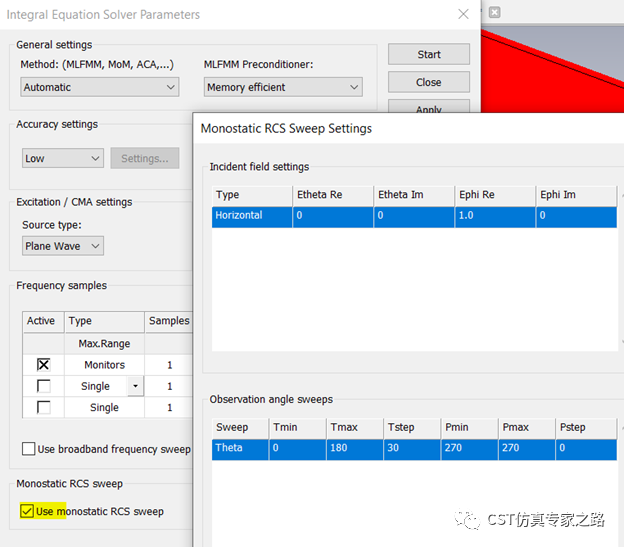
进入I求解器设置:
我们就用默认的自动设置,除了加上双精度和新的MLFMM前处理(improved convergence)。注意这里“Use monostatic RCS sweep”没有选,这个是等一下第二个方法。
进入参数扫描:
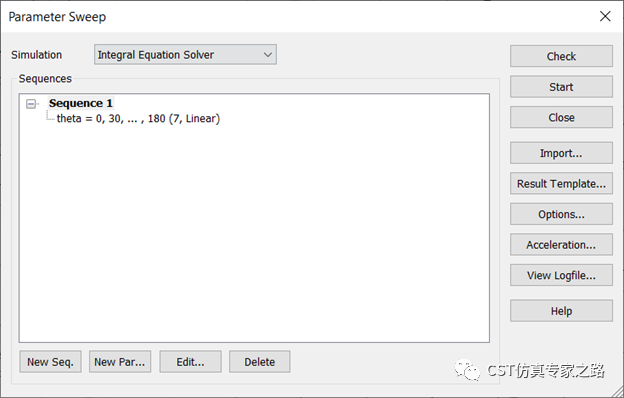
等效的扫描动图如下:

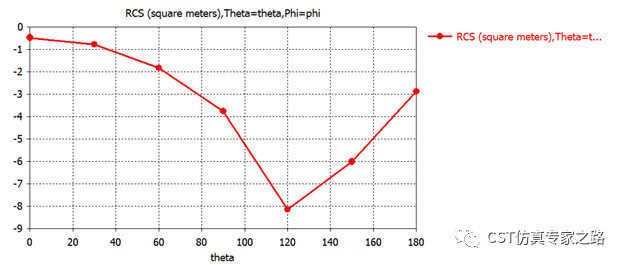
扫描完参数,查看RCS结果:
第二个方法比较推荐,效率较高,就是I-solver的Use monostatic RCS sweep,RCS快扫功能,一次仿真就能扫描出单站RCS。属性中设置极化和扫描Theta:
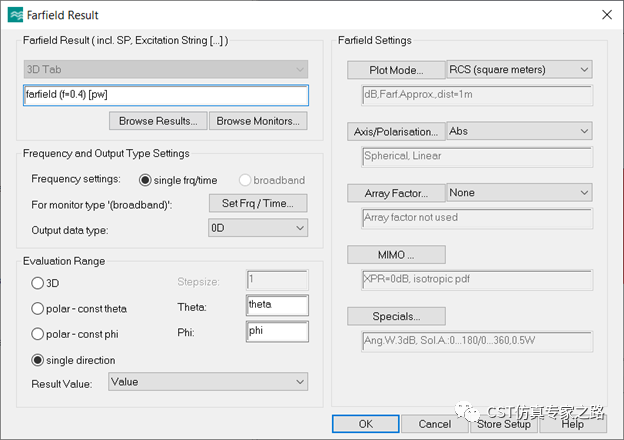
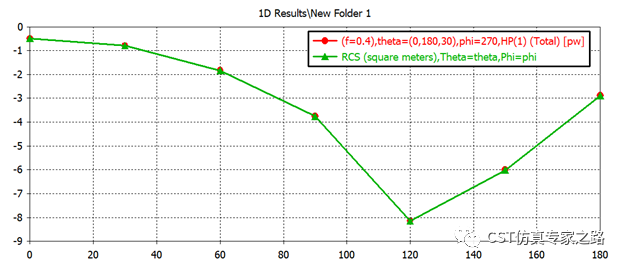
开始求解器。结束后查看RCS远场结果:
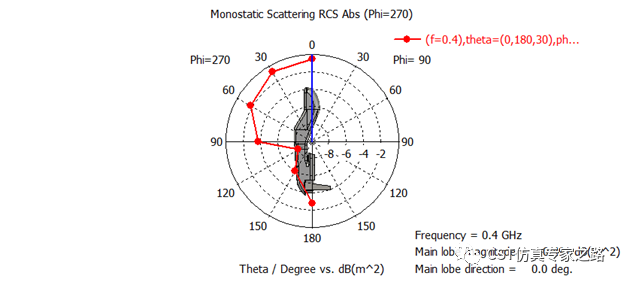
可调整结果形式:
两个方法的结果放在一起比较:
小结:
1. I-solver 单站多角度的RCS首推求解器中的快扫功能,效率高很多。也可以定义远场,然后参数扫描。I-solver不支持远场探针。
2. 本案例为了快,模型特意改小了,主要是展示方法。




