直角反射器CST仿真实例(3)- 距离多普勒, 汽车雷达ADAS
这期我们加上一个维度,既看距离,又看速度。速度的计算当然就是多普勒原理,所以距离速度的二维图又叫range-doppler图。
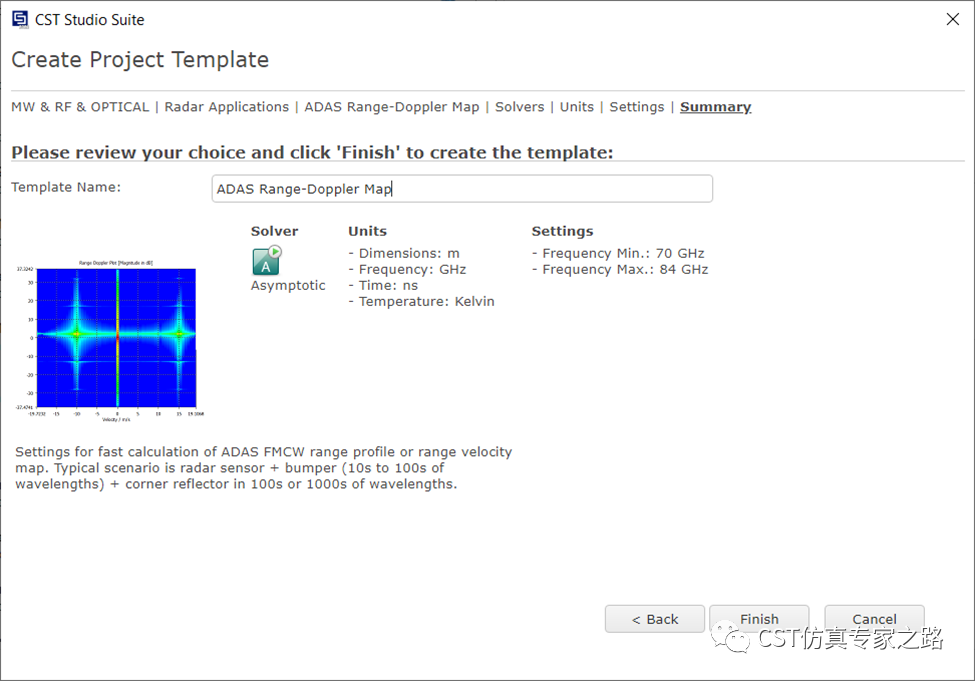
启用雷达ADAS Range-Doppler模板:
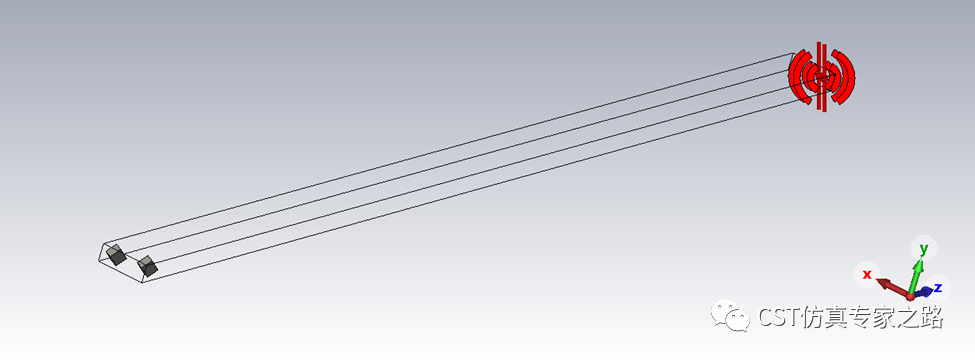
还是以这两个直角反射器为例,两个远场源,两个物体,相距两米左右:
新的准备工作当然就是定义他们的速度,这里我们要先定义几个参数,物体速度V,时间步数nT,时间步长dT,这些参数名字可以任意:

然后径向地Transform我们的物体:
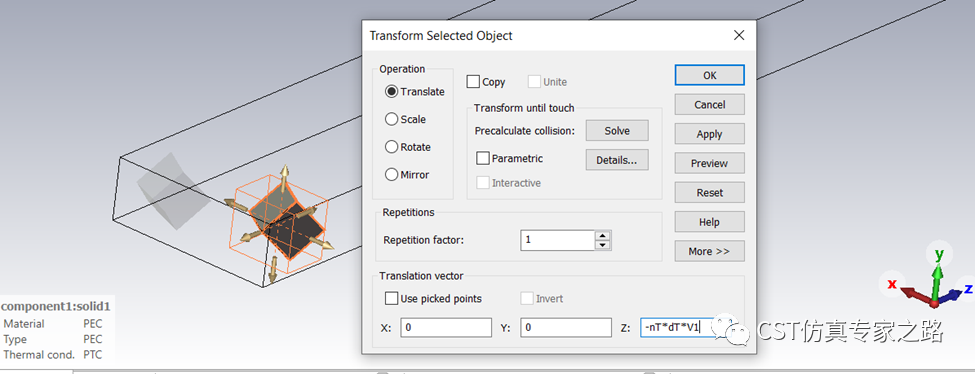
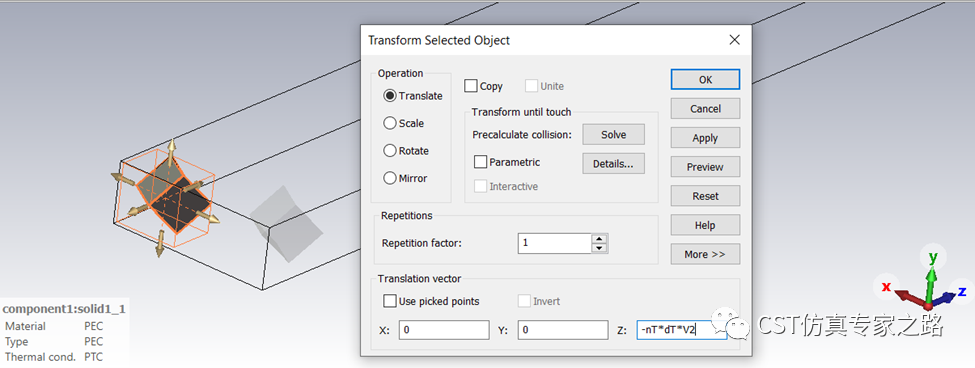
径向是指靠近或远离方向,这里大概就是Z方向。我们定义远离雷达的物体速度为正,靠近雷达的物体速度为负,所以根据实际坐标相对位置考虑这里的移动矢量定义是否加个负号。
关于Transform移动的矢量定义,需要清楚位移的计算式和单位。这里nT是整数,dT单位都是s:
CST单位m,速度V是m/s:计算式为nT*dT*V
CST 单位m,速度V是km/h:计算式为nT*dT*V/3.6
CST单位mm,速度V是m/s:计算式为nT*dT*V*1000
CST单位mm,速度V是km/h。计算式为nT*dT*V/3.6*1000
这里模拟的每个dT时间就是一个Chirp(啁啾信号)的时间,一共nT个Chirp。dT数值一般为e-6级别,就是微秒级;速度一般是几十的级别;所以以上的位移公式计算的移动距离很小,不会对计算域的尺寸有大的改变,这其实就是Fast FMCW radar中的“快”的意思,物体“几乎不动“。
下面进入求解器,模式是场源技术模式,我们就选择一个场源激励,另一个被动接收就好。选中Calculate antenna coupling。

求解器带宽可与场源带宽相同,也可更小一些。这里Fstep满足奈奎斯特香农采样,保证时域时间能够测得我们的目标和场源之间的距离。
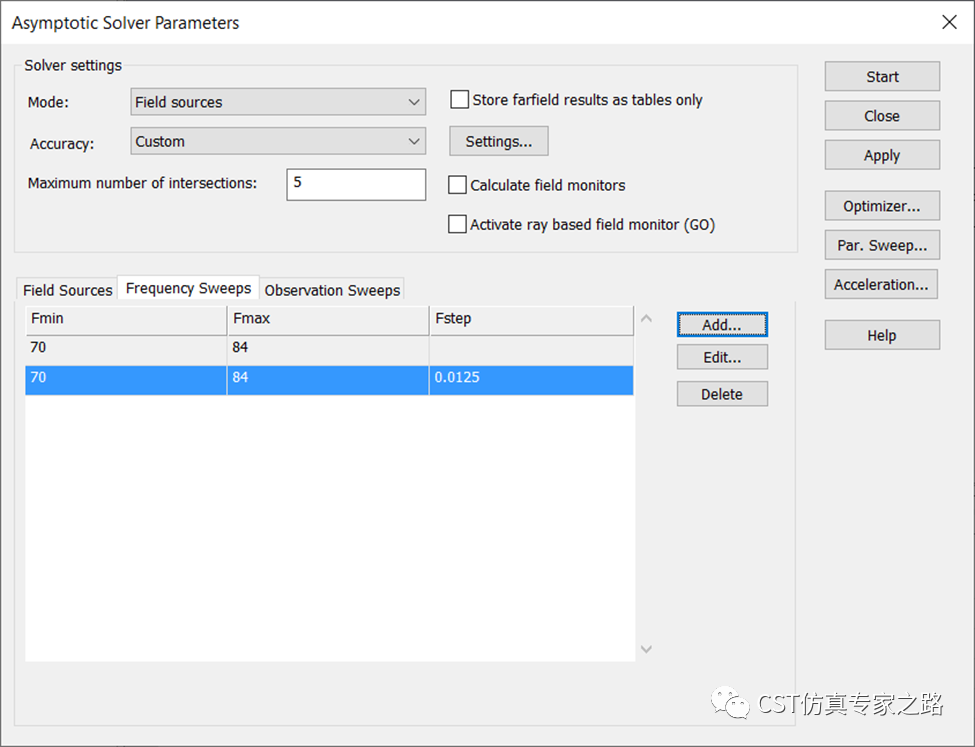
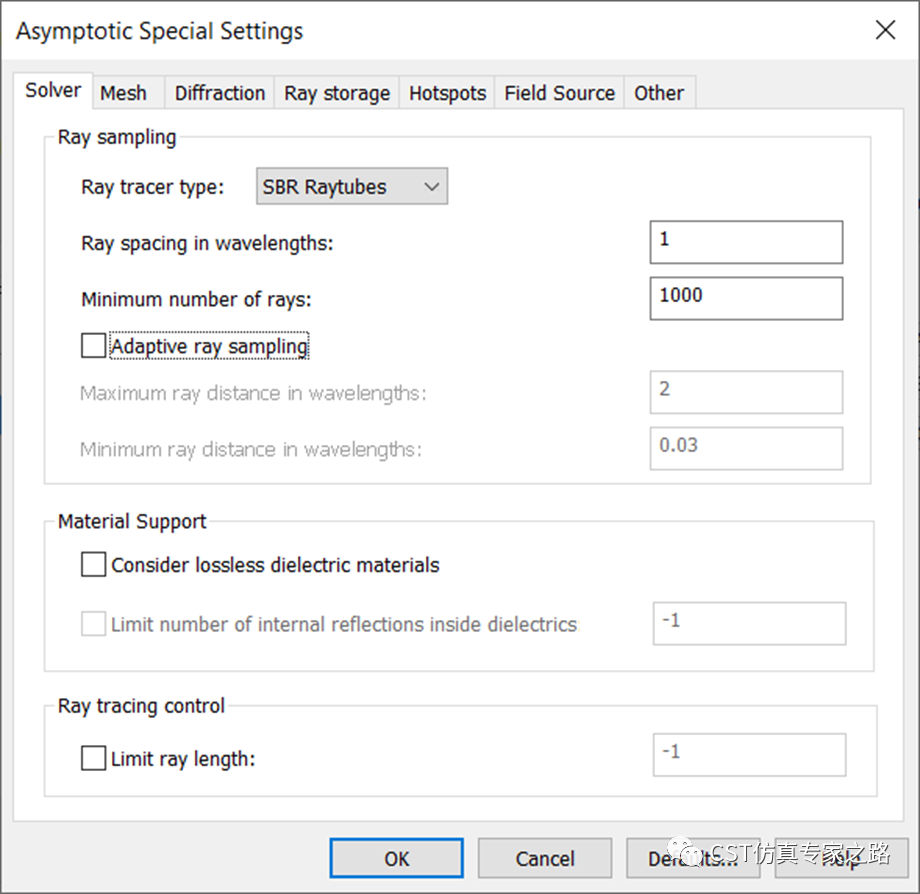
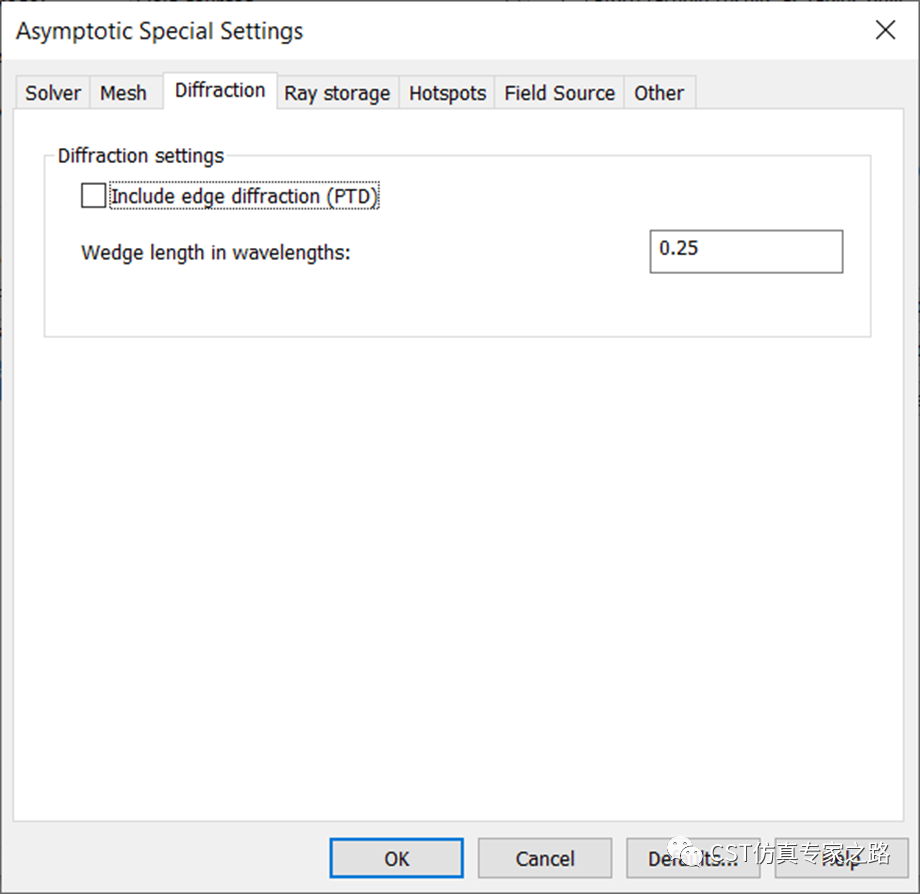
模型较简单,为了加快仿真,我们可以在Settings中取消自适应、曲面三角、和PTD。

进入参数扫描,扫描nT:
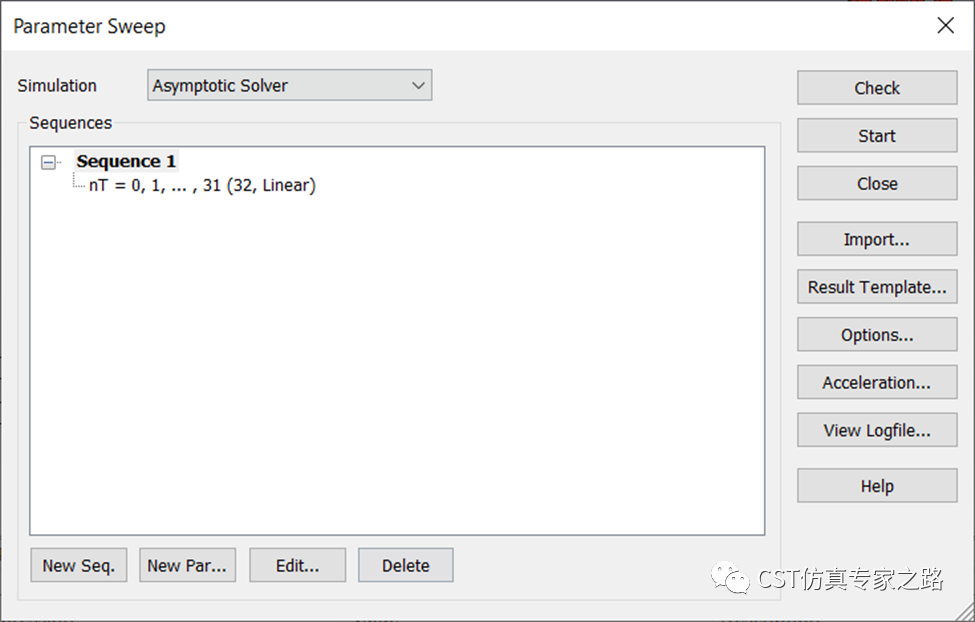
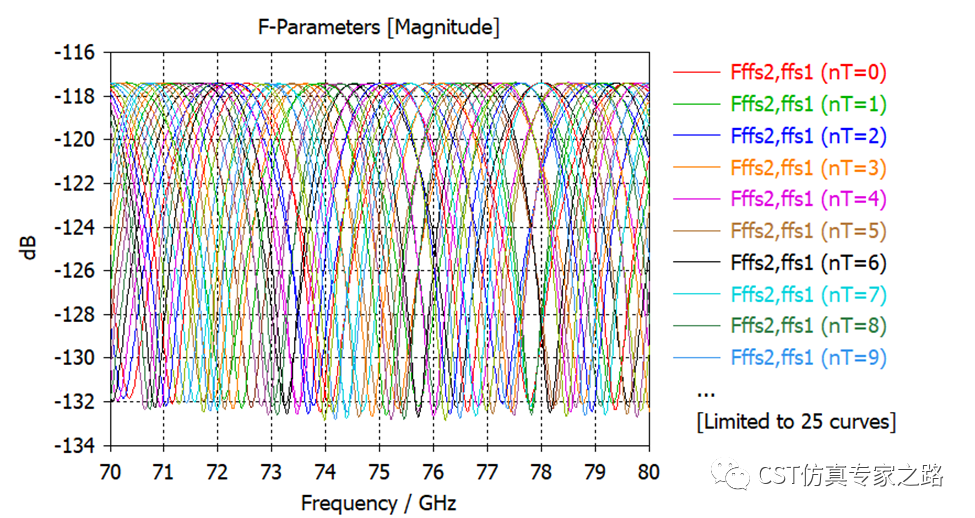
扫描结束后,得到每个Chirp时间的F21参数:
然后进入后处理,选择Range Doppler Map:
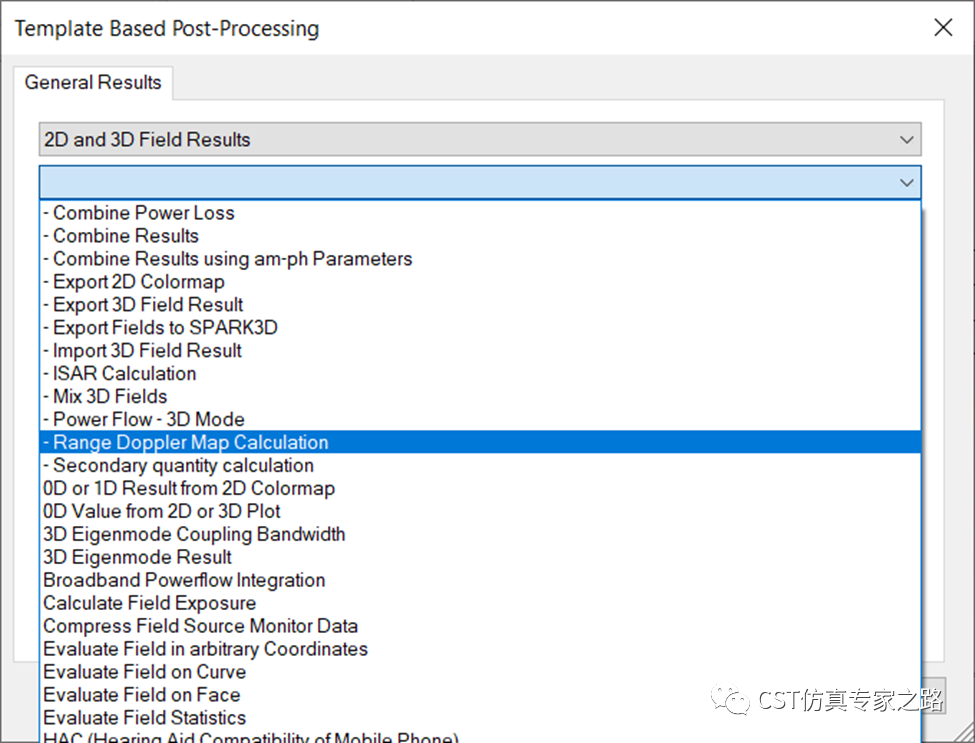
Active Source选刚才激励的场源,Receiving Source是接收的场源,Time Parameter选择nT参数,Time Step输入dT的值。若输入不同于dT的值,说明我们仿真的Chirp和我们后处理中理解的Chirp时间不同,导致RD图的速度与三维中定义的速度不同,需要避免这种混乱。
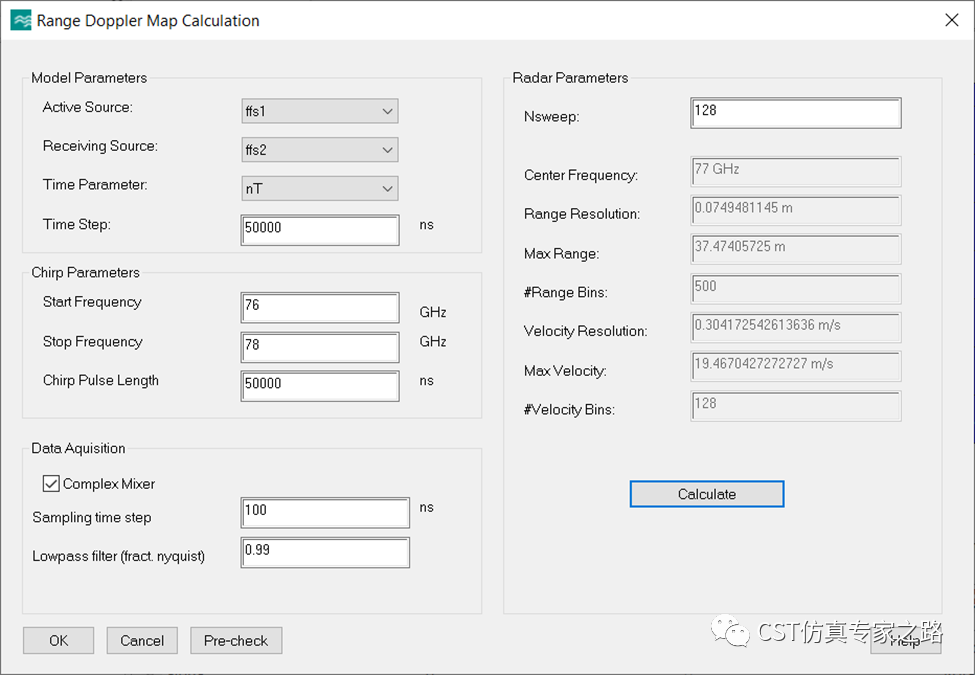
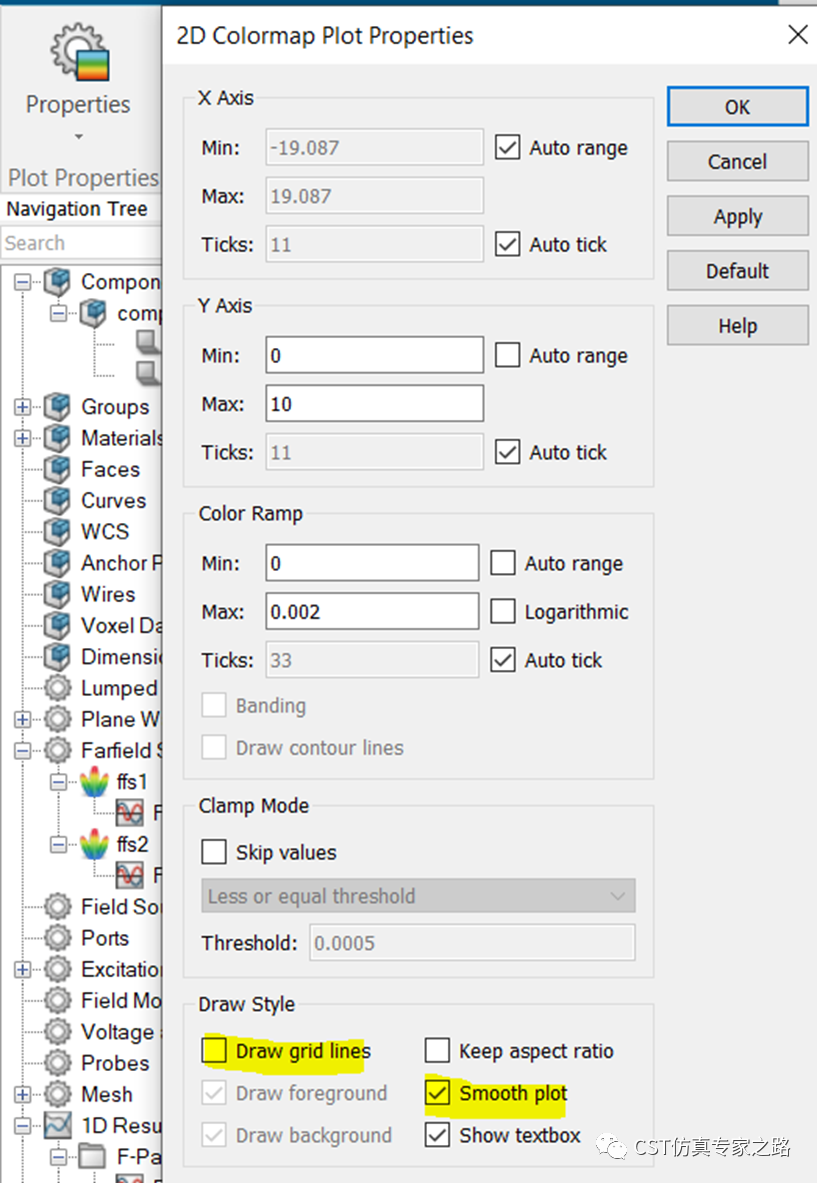
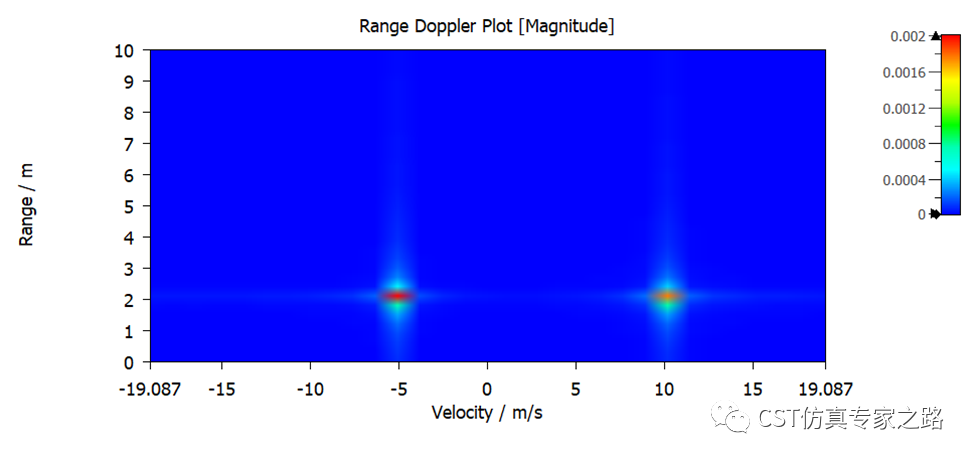
其他参数我们就按截图的数值,等下详解。点击ok后,Evaluate后处理即可得到RD图:
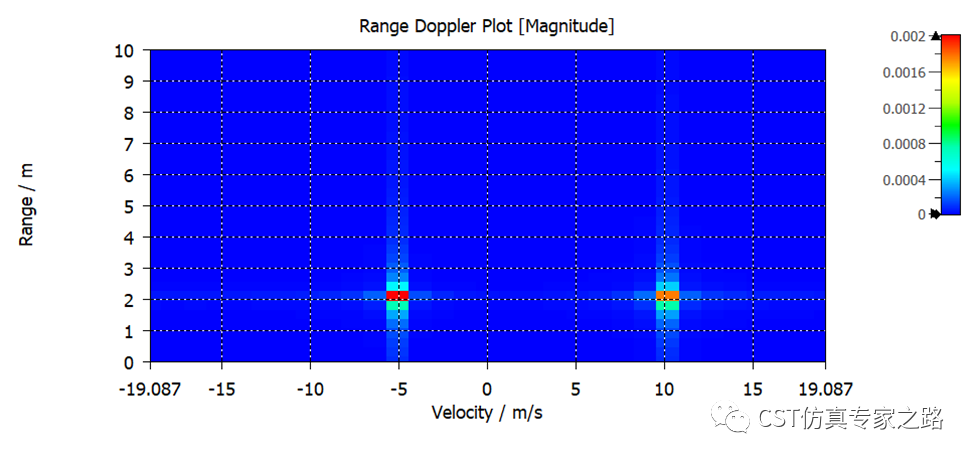
可关闭标尺,平滑色图:
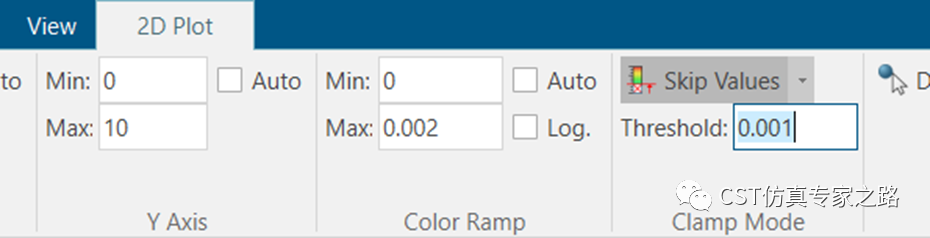
或阙值处理:
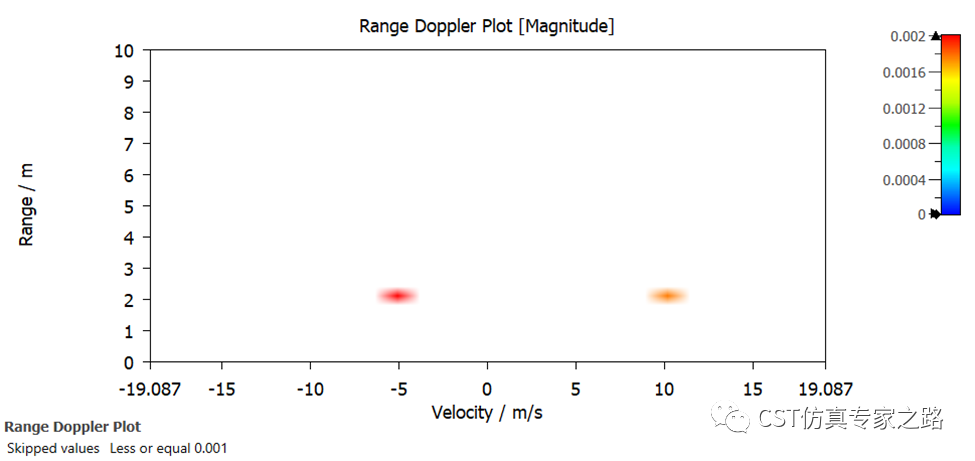
可见两个亮点是正确的距离和速度。
下面我们解释一下锯齿调制的FMCW雷达参数,这些参数都是雷达硬件供应商提供的,网上也有很多资料解释。
Model Parameters: 仿真模型相关的参数
Active Source: Tx发射天线的远场源。
Receiving Source:Rx接收天线的远场源。
Time Parameter:参数扫描的时间步参数。
Time Step:一帧(frame)内的每个时间步步长,下面简称为Tstep。设置与参数dT相同。
这个很容易和下面的Chirp Pulse Length(Tc)分不清。我们有时把一个“Chirp时长”理解为Chirp 的总时长,总时长严格定义是稳定的Chirp和其他不稳定的Chirp以及待命时间idle这些的和,这些和就是Tstep;而实际分析ADC采样时,我们对“Chirp时长”的理解就不能这么笼统了,必须明确是稳定有效的这段Chirp时间,这段时间才是Chirp的采样时间,就是Tc。
Chirp Parameter:啁啾信号相关的参数
Start Frequency:啁啾信号Chirp起始频率。
Stop Frequency:啁啾信号Chirp结束频率,与起始频率共同定义雷达信号带宽B。这两个频率要在A求解器计算的频率带宽之内,并且前后都要围绕中心频率小个几倍,
Chirp Pulse Length:一个啁啾信号Chirp的时长Tc,一般雷达是几十微秒。
需要小于或等于上述的Tstep,这是因为每个时间步长Tstep中,稳定的Chirp信号一般只占一部分,我们只在这段有效的Chirp信号中进行ADC采样。
每个Tstep或Tc,都可以理解为一次的信号发射与接收,都是可以直接计算出距离 R的。但是速度V的计算则是等到Nsweep个Tstep或Tc之后,也就是一帧之后,再FFT处理获得。
Data Acquisition: 混频器相关的参数
Complex Mixer:选择使用实数还是复数混频器,就是In-phase (I) 还是In-phase(I)+Quadrature(Q)的区别。实数混频器便宜,但是有噪音问题;复数混频器成本高,噪音较少。
Sampling time step:每个啁啾信号Chirp内的ADC采样间距,这个数越小硬件成本越贵。
Lowpass Filter (fract. Nyquist):用数字信号奈奎斯特频率的百分比来定义的低通滤波器截止频率,默认是0.99倍。
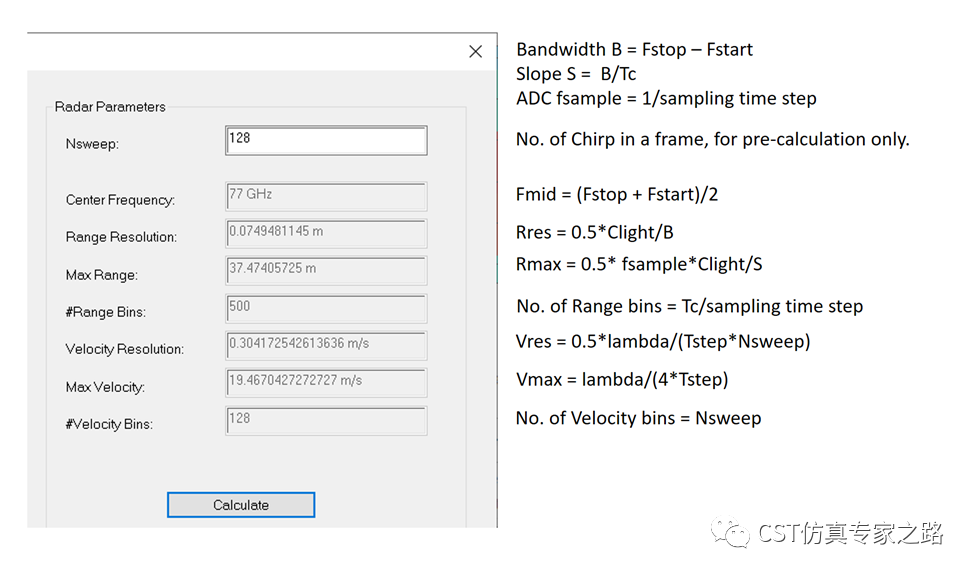
Radar Parameters: 雷达的技术参数预览(点击Calculate获得)
Nsweep:啁啾信号Chirp的数量。也就是雷达一帧内的啁啾信号个数。一般雷达都是128,有些长距离雷达是256。除了这个之外,以下的雷达技术参数都是根据之前的信息计算出来的,点击Calculate就能得到了。
Center Frequency: 啁啾信号Chirp的中心频率, (Chirp start freq + Chirp stop freq)/2。
Range Resolution:RD图中距离的分辨率:Rres=0.5*c/B,啁啾信号带宽B决定,c是光速。
Max Range:最大可测距离:Rmax=0.5*fsample*c*Tc/B。
物理上的可测最大距离是和发射功率、天线增益、信道衰减、雷达截面等等因素有关;而毫米波雷达的最大可测距离受信号处理和ADC限制,所以用的是以上公式。这里B/Tc就是啁啾信号的斜率,fsample是ADC采样频率,就是混频器参数中设置的Sampling time step的倒数。
所以在雷达设计时就要平衡选择,如果Rmax和Rres指标都固定,那么带宽B固定,这时就要选择是要短Chirp周期(斜率增加)加快扫描但增加ADC采样频率和成本,还是要长Chirp周期(斜率减少)减慢扫描节省ADC采样成本。
#Range Bins:距离的数据包个数,# range bins=Tc/sampling time step。这个是每个Chirp的采样数量。
Velocity Resolution:RD图中速度的分辨率,Vres=lambda/2/Tf,lambda 是中心频率波长,Tf =Tstep*Nsweep是一帧总时长。和之前解释的一样,这里经常见到公式写成lambda/(2*N*Tc),是一样的。
所以这里又有取舍了,啁啾信号Chirp个数越多,速度分辨率越高,但是信号处理成本也增加;Tstep越大,速度分辨率也越高,但是雷达扫描一帧的时间也加长。
Max Velocity:最大可测速度,Vmax=lambda/4/Tstep,仅与每个Chirp的时长有关。和之前解释的一样,这里经常见到公式写成lambda/4/Tc,是一样的。
#Velocity Bins:速度的数据包个数,等于Nsweep。也就是一帧里面有多少个Chirp,这些Chirp都发射和接收之后,再统一用来计算一次速度。
不确定三维和RD后处理的设置是否合适的话,点击Pre-check,观察提示信息:

Pre-check:自动检查三维设置和扫描结果,检查F21的参数扫描、Chirp带宽与求解器带宽、Chirp时长与Tstep时长等等。
nT到500的动图:
总结流程:
1. 根据三维环境中定义的目标距离,估算所需的Tmax(往返最大时间,之前文章介绍ICZT解释过Tmax),再根据Tmax和奈奎斯特香农采样定理,定义A求解器中的频率采样。求解器带宽小于等于场源带宽,雷达带宽要小于求解器带宽。
2. 参数化速度,用transform功能移动目标物体。CST中距离单位不同,使用的移动表达式就不同。
3. 参数化时间步,比如叫dT,然后扫描整数个nT得到多个F21。这里dT的定义影响能检测的最大速度,建议先估算好Vmax,不然刚才的速度参数太大不合适就白扫描了。这里的nT个数影响速度分辨率。
4. 运行后处理Range-Doppler,输入参数,Evaluate后处理得到RD结果。Evaluate之前,可用Calculate和Pre-check检查三维设置是否合适,雷达参数是否能够检测出三维设置的速度和距离。