
仿真实例009:汽车天线仿真(双向混合求解)
CST从2018版本开始具有双向混合求解,到2019版已经通用微波工作室的各个求解器之间的双向混合。具体的混合对象如下图:
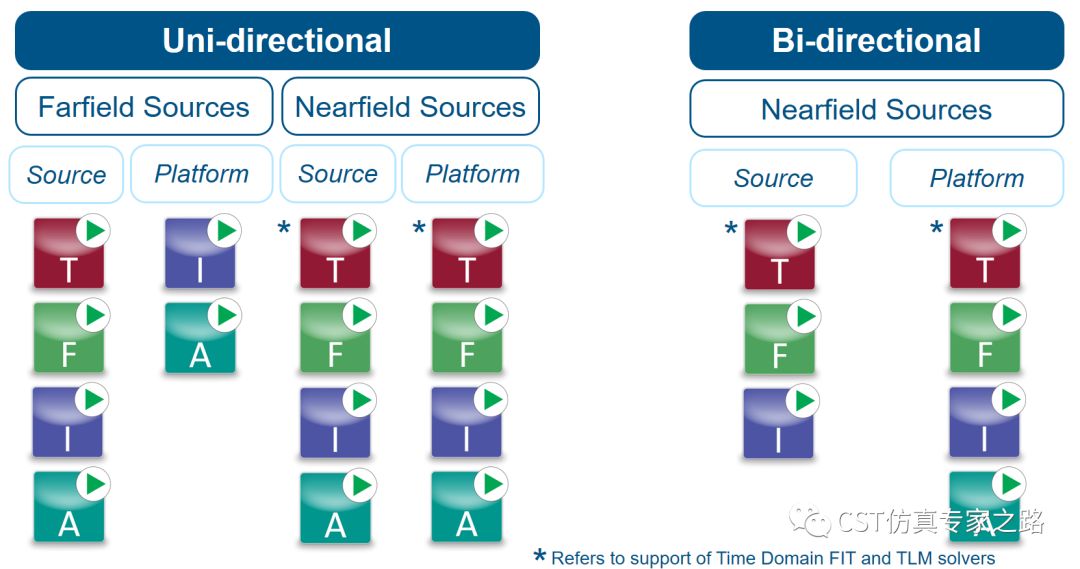
对天线的安装和耦合仿真,意味着对复杂结构(天线)和电大尺寸环境(安装平台,如车辆、飞机、船舶)仿真,如果采用单一求解器求解全部模型,例如T-solver,对于平台则会产生大量的mesh网格和巨大的计算量,反之,如采用I-solver,计算天线的馈入结构则具有挑战性。
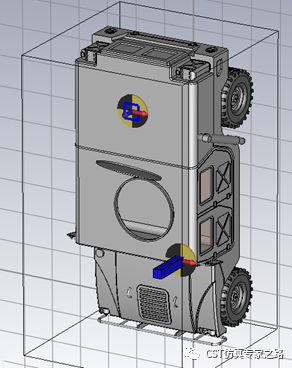
采用混合求解器(HybridSolver),可同时使用多种求解方法得到期望结果。该求解器将复杂问题分成多个部分,它们之间的联系由等效的近场或远场源定义;选择双向方式(Bi-directional)可计算场源与平台耦合过程,因此采用混合求解器可以大大加快天线的安装和耦合仿真。该求解器在多种场景下都能完成高效又不失精确的仿真,这里以天线在车辆上的安装为例进行具体的仿真介绍。
具体的操作可以见之前发布的教程,【培训视频】Part 2-1 双向混合求解这里重新发布文字版。
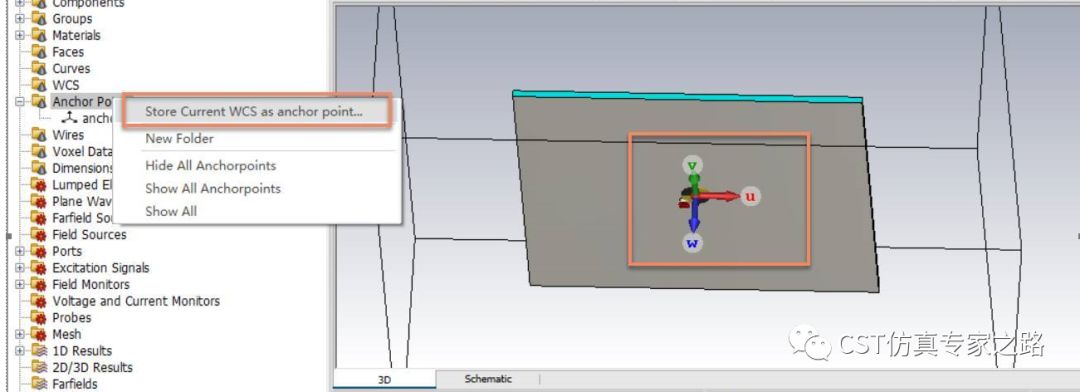
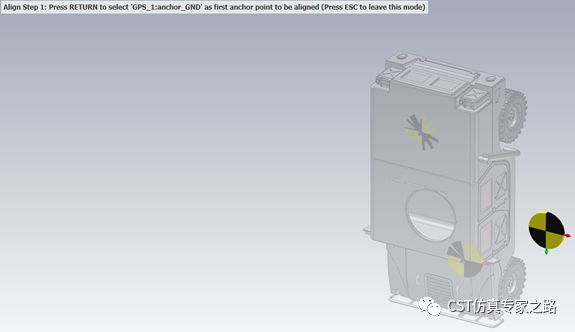
天线和平台安装点设置
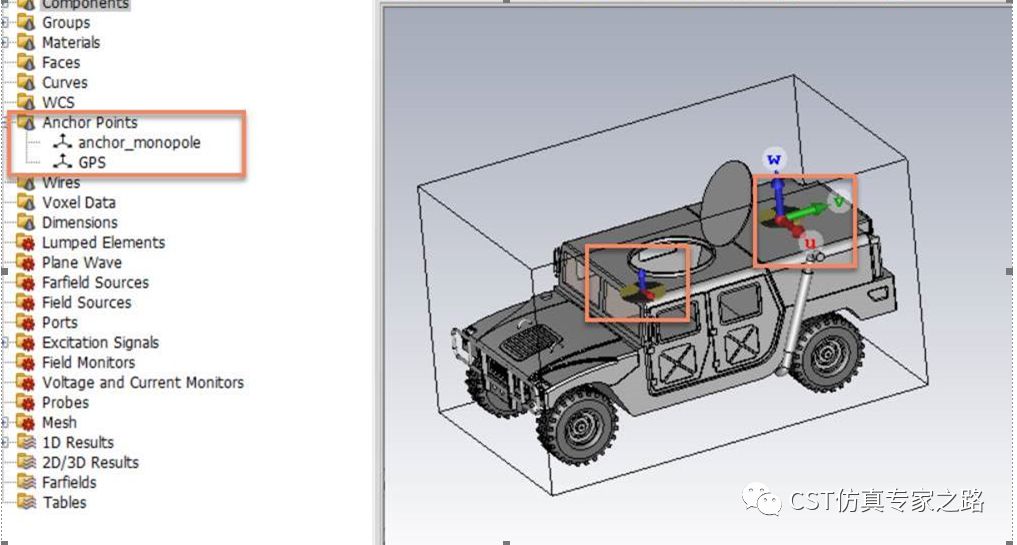
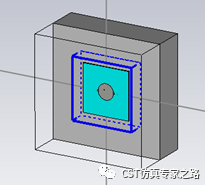
在本例中还要在安装平台上也设置相反的安装点。比如下图的一个GPS天线要安装到悍马车上需要先在天线文件里设置安装点,安装方向是相对坐标系w轴的方向。所以天线的相对坐标系的w轴方向和平台的w轴正好是相对的。
在完成上述操作后,开始正式的SAM操作。
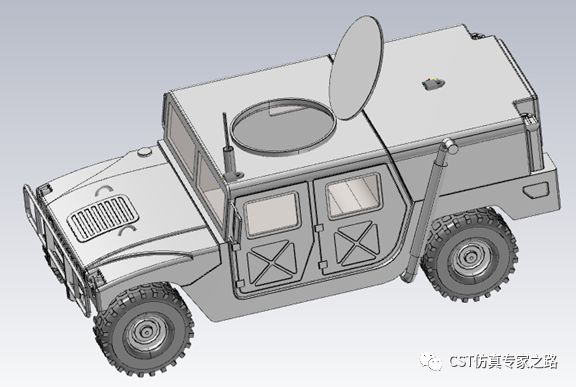
建立天线安装模型
建立系统装配与建模(SAM)
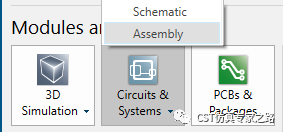
导入.cst文件,可直接将其拖拽至Assembly或使用导入功能。

将GPS天线与车辆装配,点击snapanchor points,分别选择第一个装配点和第二个装配点,将天线与车辆对齐完成装配。

对Monopole天线重复装配操作,完成两个天线装配。
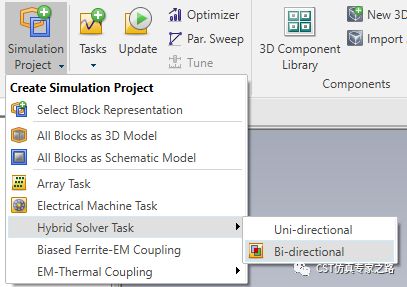
创建仿真任务
创建HybridSolver Task,选择双向Bi-driectional。
双向求解将源到平台,平台到源的耦合数据(近场)迭代计算,直到达到收敛条件。该求解方式支持T-solver和I-solver,仿真时间上Bi-directional耗时长于Uni-directional。
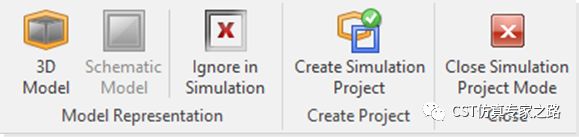
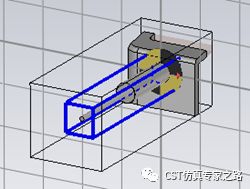
定义车辆为Platform,选择车,点击3D Model,点击create simulation Project建立仿真工程。
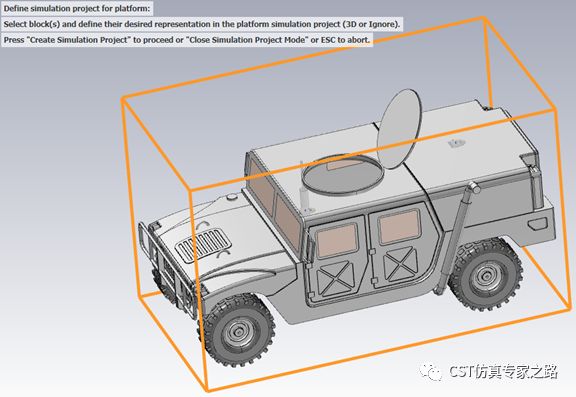
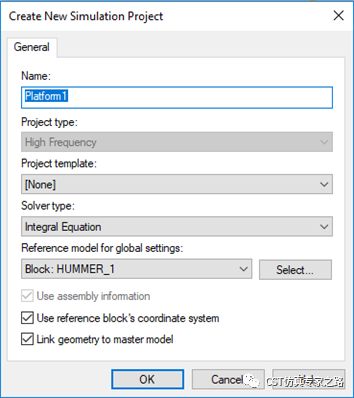
指定名称(Platform),选中本例中的悍马车block。
指定求解器(IntegralEquation)
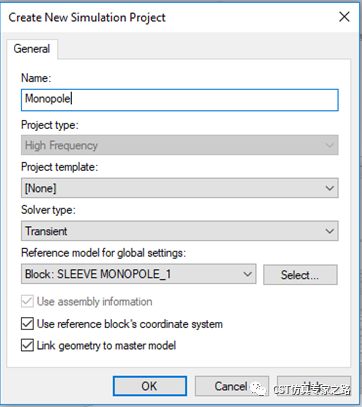
选择GPS,重复上述过程。

选择Monopole,同样重复上述过程。
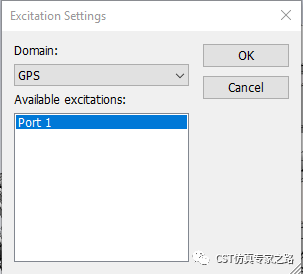
点击closesimulation Project,仿真任务创建,弹出激励设置,选择GPS区域作为激励。
指定近场源频率范围
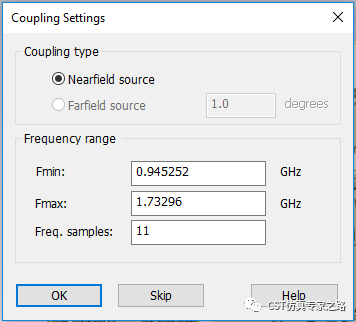
检查仿真项目设置
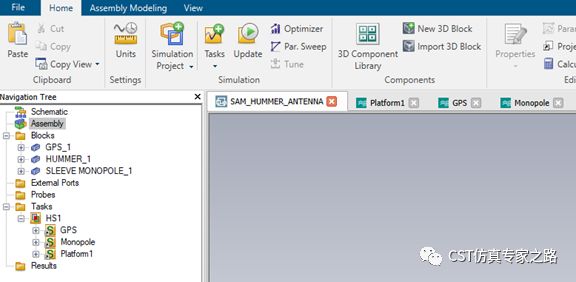
设置完成的混合求解器任务可在NavigationTree-Tasks中观察到
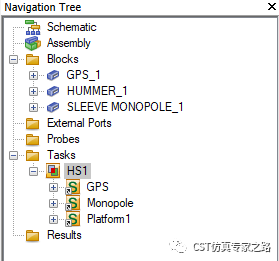
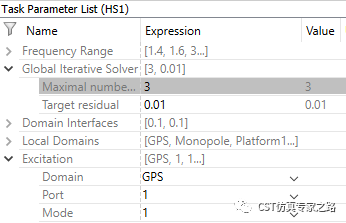
选择HS1任务,可在任务参数列表中修改相应参数,例如将最大迭代次数修改为3以减少仿真时间。
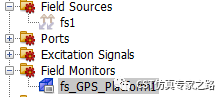
每个项目自动创建,且至少包含一对场源数据,fieldsource 和fieldsource monitor,fieldsource monitor可获得场数据,fieldsource指其它域的场数据。

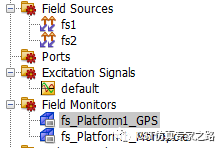
其中GPS源部分的内容,如下:
monopole子任务中内容如下:
开始仿真
点击Update,等待计算结果。
分析结果
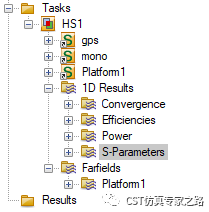
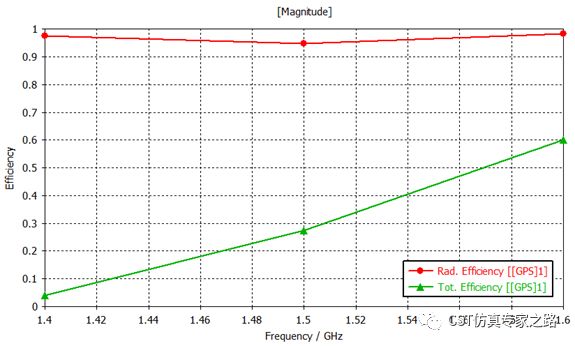
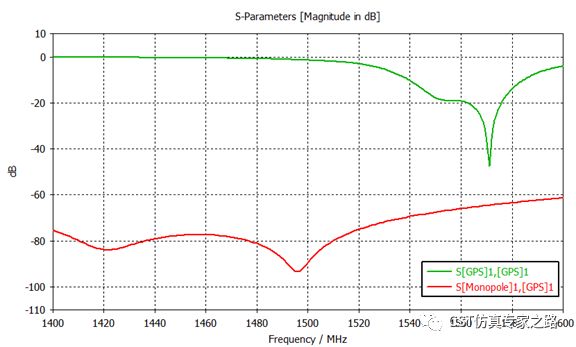
在结果中查看一维仿真结果,如效率和S参数。
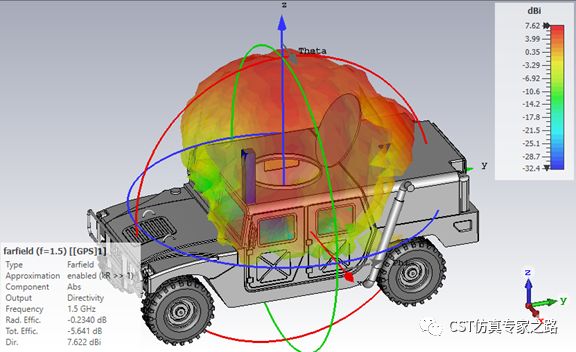
点击farfield,观察远场结果
总结
以上就是汽车天线安装到车辆平台上的仿真流程,双向混合解决了平台尺寸大的问题,同时双向混合充分考虑了源和平台之间的耦合问题,保证了求解精度。如有问题,可在文后留言。

本篇部分内容由达索系统专家王远腾整理完成,如想和作者有更多交流,可报名CST官方的免费培训达索系统广州办公室 2019年5月CST基础应用技术论坛邀请函。




