如何防止爱车被撞?麦通科技来为您支招
05-08
雷达测距防撞控制系统(Distronic,简称DTR)属于汽车主动安全装置,是当前国际汽车安全领域研究的热点之一。主要实现3个功能防撞预警,辅助停车,盲点探测等。汽车防碰撞技术首先需要解决的问题是汽车之间的安全距离。汽车与汽车之间的距离小于安全距离,就应该能够自动报警,并采取制动措施。
目前,测定汽车之间安全距离的方法有三种:超声波测距、毫米波雷达测距和激光测距,
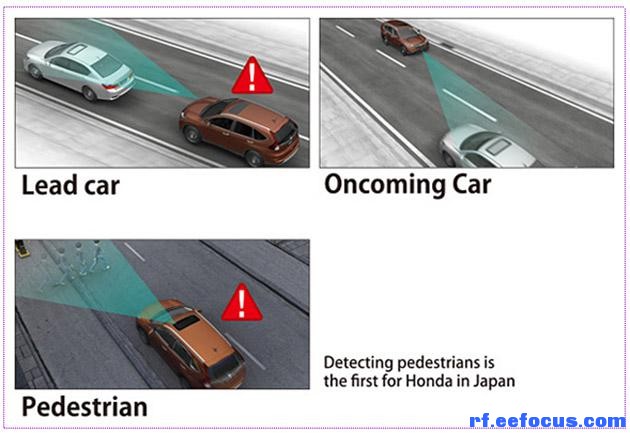
防撞雷达系统装配在车辆的前方、侧方或者后方,完成前视防撞(防追尾碰撞)、侧视防撞(防更换车道时两车相撞)和后视防撞(防倒车时与车后阻碍物相撞)等侧重点各异的功能。
为完成上述功能所应达到的技术要求是系统应具有测距、测速、测角的功能。
【雷达测距控制系统的组成】
DTR雷达控制模块
DTR雷达传感器(激光雷达、 毫米波雷达传感器)
DTR电脑
可变巡航控制(CC)开关
DTR开关座(具有距离测量电位差计和警报信号消除开关)
信息联络(CAN)(用于仪板上的显示装置及警报信号
发布装置和各种控制机构的信息联络)
天线、发射/接受组件
中频信号处理装置
电源及报警显示
【雷达测距系统的组成框图】
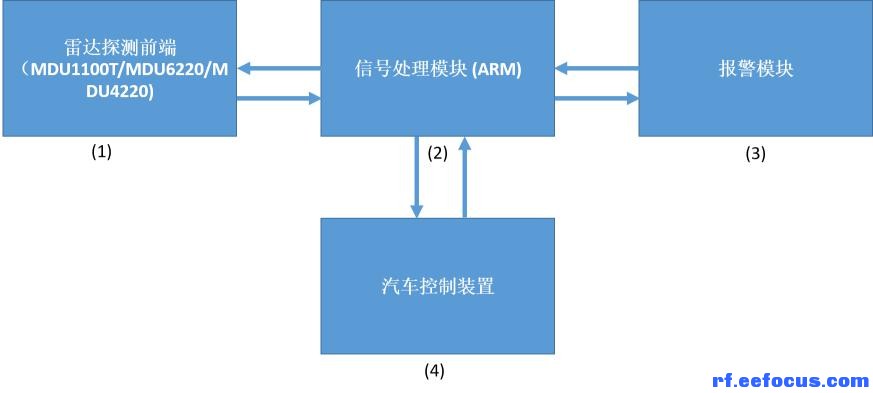
(1)射频收发前端是雷达系统的核心部件,负责信号调制.,射频信号的发射接收及接收信号解调, 麦通科技提供的微波模块负责该功能的实现,雷达推荐型号:MDU6220 (探测距离>100m), MDU4220 (探测距离>50m), MDU1100T (探测距离>20M)
(2)信息处理模块自动分析,计算出与前方车辆间的距离和相对速度,并且防止转弯时错误测量临近车道车辆的情况发生
(3)汽车控制装置: 即控制汽车的自动操作系统,达到自动减速慢速行车,或紧急刹车。通过限制发动机输出转速,调节刹车作用力及变速箱挡位,控制定速巡,航的车速
(4)报警系统:安装在驾驶室前部,精确显示前方障碍物的距离值,面板上的数字键,可根据实际情况设定保京距离值,还有特殊输出接口,当系统报警时,该接口会输出TTL电平,可用于自动刹车开发
【工作原理】
在车辆行驶中,雷达窄波束向前发射电磁波信号,当发射信号遇到目标时,被反射回来被同一天线接收,经混频放大处理,可用其差拍信号间来表示雷达与目标的距离,再根据差频信号相差与相对速度关系,计算出目标对雷达的相对速度,微处理器将上述两个物理量代入危险时间函数数字模型后,既可算出危险时间,当危险程度达到各种不同等级时,分别输出报警信号或通过车辆控制电路去控制车速或刹车。当距离过近时,有些车型警告喇叭会响起,以警告驾驶者注意前方障碍物已经接近车体,同时DTR电脑会通过车身电脑网络CAN-BAS与发动机ECU、变速器ECU及ESP(车辆稳定行驶系统) 、ABS刹车系统ECU,通过限制发动机输出转速,调节刹车作用力及变速箱挡位,控制定速巡航的车速。若前方无障碍物(100米为限)则警告灯会熄灭,车子便会加速至预设的巡航速度

目前无人机的防撞也是市场上迫切解决的问题,可以参考汽车的防撞方案。
详细技术细节请联系麦通索取。
目前,测定汽车之间安全距离的方法有三种:超声波测距、毫米波雷达测距和激光测距,
防撞雷达系统装配在车辆的前方、侧方或者后方,完成前视防撞(防追尾碰撞)、侧视防撞(防更换车道时两车相撞)和后视防撞(防倒车时与车后阻碍物相撞)等侧重点各异的功能。
为完成上述功能所应达到的技术要求是系统应具有测距、测速、测角的功能。
【雷达测距控制系统的组成】
DTR雷达控制模块
DTR雷达传感器(激光雷达、 毫米波雷达传感器)
DTR电脑
可变巡航控制(CC)开关
DTR开关座(具有距离测量电位差计和警报信号消除开关)
信息联络(CAN)(用于仪板上的显示装置及警报信号
发布装置和各种控制机构的信息联络)
天线、发射/接受组件
中频信号处理装置
电源及报警显示
【雷达测距系统的组成框图】
(1)射频收发前端是雷达系统的核心部件,负责信号调制.,射频信号的发射接收及接收信号解调, 麦通科技提供的微波模块负责该功能的实现,雷达推荐型号:MDU6220 (探测距离>100m), MDU4220 (探测距离>50m), MDU1100T (探测距离>20M)
(2)信息处理模块自动分析,计算出与前方车辆间的距离和相对速度,并且防止转弯时错误测量临近车道车辆的情况发生
(3)汽车控制装置: 即控制汽车的自动操作系统,达到自动减速慢速行车,或紧急刹车。通过限制发动机输出转速,调节刹车作用力及变速箱挡位,控制定速巡,航的车速
(4)报警系统:安装在驾驶室前部,精确显示前方障碍物的距离值,面板上的数字键,可根据实际情况设定保京距离值,还有特殊输出接口,当系统报警时,该接口会输出TTL电平,可用于自动刹车开发
【工作原理】
在车辆行驶中,雷达窄波束向前发射电磁波信号,当发射信号遇到目标时,被反射回来被同一天线接收,经混频放大处理,可用其差拍信号间来表示雷达与目标的距离,再根据差频信号相差与相对速度关系,计算出目标对雷达的相对速度,微处理器将上述两个物理量代入危险时间函数数字模型后,既可算出危险时间,当危险程度达到各种不同等级时,分别输出报警信号或通过车辆控制电路去控制车速或刹车。当距离过近时,有些车型警告喇叭会响起,以警告驾驶者注意前方障碍物已经接近车体,同时DTR电脑会通过车身电脑网络CAN-BAS与发动机ECU、变速器ECU及ESP(车辆稳定行驶系统) 、ABS刹车系统ECU,通过限制发动机输出转速,调节刹车作用力及变速箱挡位,控制定速巡航的车速。若前方无障碍物(100米为限)则警告灯会熄灭,车子便会加速至预设的巡航速度
目前无人机的防撞也是市场上迫切解决的问题,可以参考汽车的防撞方案。
详细技术细节请联系麦通索取。
这可真好看
相关文章:
- 一对收发定向天线如何防止同频信号泄露? (05-08)
射频专业培训教程推荐