微操纵与微装配技术
05-08
研究背景
为了获得更加功能化的微器件,微系统正在变得越来越复杂,制作难度也相应地增加。然而,由于工序过于复杂、工艺不兼容等原因,依赖传统的加工工艺获得复杂的整体三维器件非常困难。如果考虑把各零部件分别加工,再利用微装配技术进行组装,则可以在相对较低的成本下获得复杂的三维微结构,从而以较低的成本实现更加强大的功能。微装配的核心是微操纵技术。由于微器件的脆弱和微观物理学上的差异,以及缺乏高效灵巧的微操作器,微装配技术离实用化还有一定的距离。
除了用于微器件装配之外,微操作系统还可用于远程手术,生物细胞操作等。
研究内容
1. 微尺度下的力学行为,环境参数对微操纵的影响;
2. 粘附型的微操作器和机械夹持微操作器;
3. 远程自动微操纵系统;
4. 自动微操作系统中的摄像机定标技术,目标快速识别,移动路径规划。
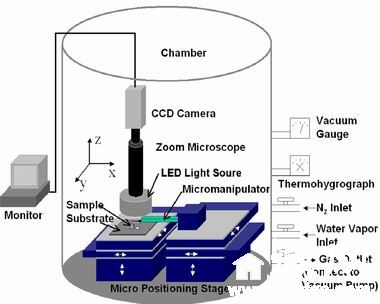
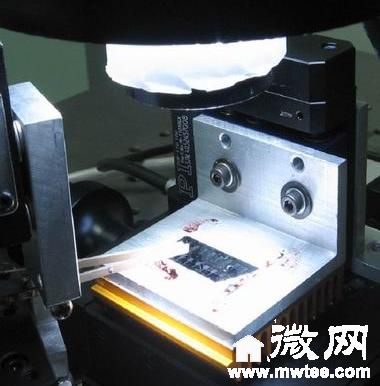
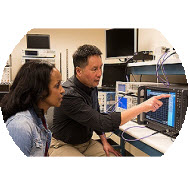
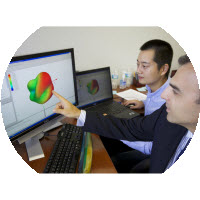
环境可控的远程微操作系统结构示意图 微操作工作场景
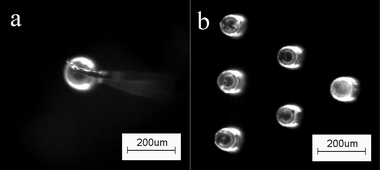
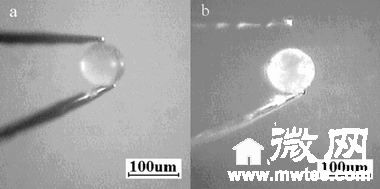
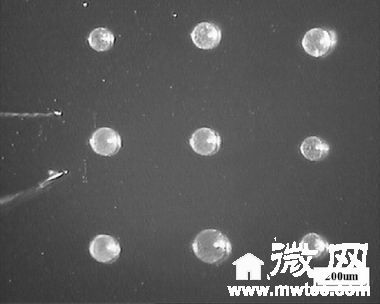
粘附型微操作器堆放的小球 机械夹持器操作小球,释放时发生了粘附(右图
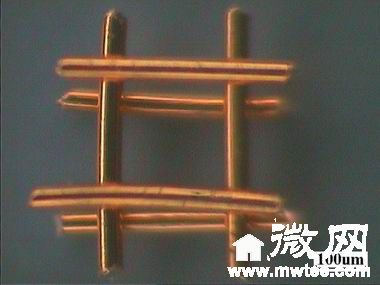
机械夹持器堆放的高分子小球 机械夹持器堆放的小铜棒
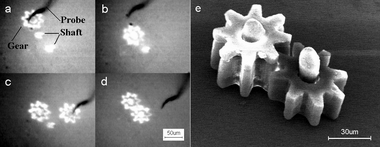
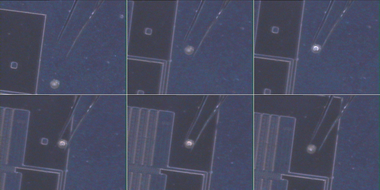
装配完成的微型齿轮 微器件自动操纵
好专业的文章啊。厉害。
顶一个!
顶一个!
献出一点,举手之劳;鼓舞他人,获取更多!
相关文章:
- 新型液压离合器液压操纵系统性能测试系统(05-08)
- Protel常见技术问题答复(05-08)
- PROTEL技术大全(05-08)
- 真空蚀刻技术(05-08)
- 关于多层印制板生产中的电镀锡保护技术(05-08)
- EDA技术的概念及范畴(05-08)
射频专业培训教程推荐