![]()
![]()
After the field calculation, the forces and torques on 3D objects like solids, magnets and coils or on groups of 3D objects can be calculated as a post processing step. The algorithm implemented is discretely equivalent to the virtual work method and requires the object under consideration to be completely surrounded by background material (usually air or vacuum).
After the forces and torques are calculated, a result file appears in the navigation tree and is automatically opened. The exact name in the navigation tree depends on the solver (e.g. ”EForces” for electrostatic, "MForces" for magnetostatic forces). The file includes information about the force vector acting on each object or group of objects, and the torque in direction of the defined axis.
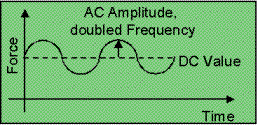
For time harmonic fields the force represents a quantity changing in
time and will be characterized by three parameters in each vector component:
the DC Value ![]() , for the part constant in time, and the real and imaginary part
of the complex AC amplitude
, for the part constant in time, and the real and imaginary part
of the complex AC amplitude ![]() . Then, the time dependent force can be computed by
. Then, the time dependent force can be computed by
![]()
Source Fields
Select a field type from a list of available/calculated types. If only one field-solution is present, the drop-down list shows this very field, but is disabled.
Comp. forces on groups of touching shapes
The force computation method requires objects which are surrounded completely by the background or by objects that are equivalent to the background.
An object is considered as equivalent to the background if
it has the same material coefficients (e.g. for electrostatics the same permittivity, or for magnetostatics the same permeability) and
it is not occupied by a source.
When this check box is activated, connected shapes that are not equivalent to the background will be collected into groups and each group will be treated as one force object to be evaluated. Please note that using this policy it is possible to define some dummy objects with vacuum material for mesh-tuning can directly touch or connect two real objects, e.g. in air gaps.
If the check box is deactivated, the forces and torques will be computed object by object, and a warning will be printed if shapes are detected which are not entirely embedded in background or equivalent material.
Example:
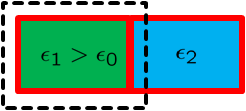
Consider the simple electrostatic setting below with two touching solids and vacuum background material.
If ![]() ,
then the second solid is equivalent to the background. Since solids that
are equivalent to the background are ignored by the automatic group detection,
the force on the first object will be computed, independent of the state
of the checkbox. (Fig. 1)
,
then the second solid is equivalent to the background. Since solids that
are equivalent to the background are ignored by the automatic group detection,
the force on the first object will be computed, independent of the state
of the checkbox. (Fig. 1)
If ![]() , the result
depends on the checkbox state.
, the result
depends on the checkbox state.
If the checkbox is inactive the force will be computed only for the
first object again. However, now this object is not completely in the
background or equivalent material and the result may be inaccurate. The
force calculation will show a warning in this situation. (Fig. 1)
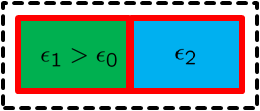
If the checkbox is activated the resulting force on the group of both
touching objects will be computed. Since this group is completely embedded
in background material the requirements of the algorithm are met. (Fig.
2)
|
Fig. 1 |
Fig. 2 |
Please note: Automatic group detection and warnings are only available with results computed by tetrahedral solvers.
Compute force density
Activate this check box in order to compute and export the distributions of volume and surface force densities as well as nodal forces. Background material and materials equivalent to it are hereby ignored. These distributions can afterwards be imported by the Structural Mechanics Solver for computation of mechanical deformation.
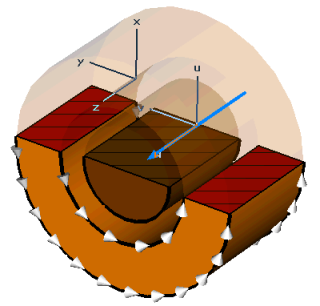
Torque Calculation Frame
Axis direction (X, Y, Z // U, V, W)
Defines the torque calculation axis normal in x/y/z coordinates or u/v/w.
Axis origin (X, Y, Z // U, V, W)
Defines the torque calculation axis origin in x/y/z coordinates or u/v/w.
Calculate
Calculates Forces and Torques using the current settings for all 3D solids.
Preview
Visualizes the current torque axis definition.
Cancel
Closes this dialog box without performing any further action.
Help
Shows this help text.